
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
基于路权分配原则的自动驾驶广义决策框架
来源:江南网页版登录入口官网下载
网
时间:2022-04-28 15:01:19
热度:
基于路权分配原则的自动驾驶广义决策框架本文来源:智车科技/ 导读 /摘要:2018年6月,自动化所王飞跃研究员团队等人与英特尔公司合作联合成立英特尔智能网联汽车大学合作研究中心,开
本文来源:智车科技
/ 导读 /
摘要:2018年6月,自动化所王飞跃研究员团队等人与英特尔公司合作联合成立英特尔智能网联汽车大学合作研究中心,开展平行驾驶关键技术相关研究。近期,该团队联合提出了提出了确定自动驾驶场景路权归属的三个原则,并设计了一种基于路权分配规则的广义协商驾驶决策框架以实现这些原则。该项研究发表于智能交通领域顶级国际期刊IEEE Transactions on Intelligent Transportation Systems(简写IEEE TITS),引起了自动驾驶和智能交通领域研究人员的广泛关注,为提升自动驾驶决策的安全性、助推自动驾驶汽车上路运营提供了有力的理论和技术支持。

图1. 出现潜在冲突时路权归属决策示例
1
自动驾驶场景下路权归属研究
当前,自动驾驶技术研究领域尚未形成一个公认的理论指导驾驶主体在特定场景下应该选择或者禁止哪种驾驶行为。这主要可以归结为两个难以解决的困难:首先,现有的策略没有很好地考虑自动驾驶汽车和传统汽车之间的交互。传统的刺激应答模型或博弈模型并不能完整精准的描述人类驾驶员的风险规避行为。而若自动驾驶决策系统在设计时没有充分考虑人类驾驶习惯,其行为和意图可能反而会被人类驾驶员误解,这种缺陷有时会导致严重的安全风险。其次,现有的自动驾驶策略研究普遍不够抽象与普适,无法覆盖各类存在路权冲突的结构化道路场景,这导致不同策略研究者针对不同场景提出的解决方案往往存在差异。这种共识的缺乏将会导致不同品牌、不同技术路线与不同目标设定下的自动驾驶车辆间缺乏兼容性,对路权归属产生争议,进而影响到道路安全与行驶效率。
该研究填补了相关领域的研究空白,所提方法可使自动驾驶汽车和人类驾驶员充分理解彼此的行为和意图,并且路权归属决策过程无歧义、易于计算、沟通最少。相关研究成果此前曾以长文形式发表在智能交通领域顶级国际期刊IEEE TITS。
文章以“Three Principles to Determine the Right-of-Way for AVs: Safe Interaction With Humans”为题,提出了自动驾驶策略的三项原则和三点技术挑战:
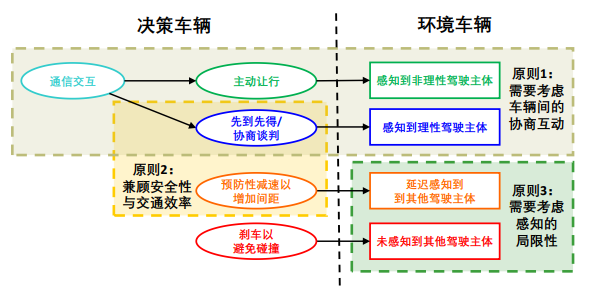
图2. 路权分配过程应遵守的三个核心原则
挑战1:如何考虑自动驾驶汽车与人类驾驶员之间的通信交互过程,以确定合作模式下的路权归属?
原则1:应考虑到车辆间的沟通交互过程——在大多数情况下,路权关系通常无法迅速确定,驾驶主体往往需要花费一段时间相互沟通,通过沟通中的隐性或显性通信获取线索信息,以确定谁的路权优先级更高。沟通交互过程应该尽可能简单,以确保建立简单而无歧义的互动规则。并且,需要考虑到可能的协商失败。为了降低安全风险,有必要对可能出现的协商失败或非理性驾驶行为进行针对性应对策略设计。
挑战2:如何在各种行驶条件下,保证驾驶安全和驾驶效率之间的平衡?
原则2:应该在安全和通行效率之间保持适当的平衡——一个合理的自动驾驶策略应该在安全和通行效率之间保持适当的平衡。如果自动驾驶车辆追求避免一切可能发现碰撞事故,那么就可能陷入过度保守的困境,时刻提防其他车辆可能的非理性行为从而导致自身的合理行驶权利受到影响。因此,本文所设计提出的协商驾驶策略主要采用理性驾驶员假设,即在协商前,自动驾驶汽车对其他车辆持有理性预期,相信他们会大概率遵守人类的驾驶规则与交互习惯,但同时也不会将其视为具有100%确定性的个体。对他们的判断应该根据感知信息实时更新,制定非预期情况下的应急预案同样必要。挑战3:在自动驾驶汽车的感知过程被简化的情况下,如何考虑自动驾驶汽车和人类驾驶员的能见度限制?
原则3:应保守处理感知的局限性——受限于天气、遮挡、故障等各种原因,自动驾驶车辆的感知距离与感知精度可能下降,因此驾驶主体应该始终为尚未观测到的潜在路权冲突做好准备。具体来说,当潜在冲突区域(如匝道汇合、交叉路口等场景)周围交通状态感知准确度欠佳时,驾驶主体应检查当前速度下是否能避免潜在的碰撞风险。必要时,自动驾驶车辆应该提前减速,以确保留有足够的空间进行紧急避险。
基于上述原则,本文提出了一种基于路权分配规则的广义协商驾驶决策框架,并通过流程化的条件判决规则确定各种场景下的路权归属。这种形式化的方法可以直观、具体、可验证地遵循人类驾驶逻辑分配路权。与传统规则决策模型相比,该框架具有以下优点:第一,该框架普遍适用于存在潜在冲突风险的各类道路交通场景,可在应用时根据实际路权冲突情况进行针对性的适配与设计;第二,该框架仿照人类驾驶逻辑,基于先到先得原则将多车路权分配问题转化为多组一对一的决策问题,从而大大降低了所需的计算与通信资源,在每个时间间隔内,驾驶主体只需与最近的一辆车进行交互,并根据协商结果判断是否有必要继续与其他车辆互动;第三,出于实用性的考虑,该决策过程简洁易懂且逻辑性强,满足可验证性的同时尽量避免了决策过程中可能存在的语义模糊与分歧。

基于路权分配规则的广义协商驾驶决策框架
本项研究为自动驾驶场景下的路权归属决策提供了一种定量、可操作的理论范式。该理论不仅能够提升自动驾驶的决策水平和安全性,而且具有较高的普适性,能够应用到其他人类和机器人同时共享关键资源的场景中。
该研究成果为中科院自动化研究所、清华大学、英特尔智能网联汽车大学合作研究完成,是清华大学和自动化研究所联合研究课题“的智能车辆行为控制”研究的延续,并得到慧拓智机器有限公司大力支持和应用测试,实现了研究、测试与示范的一体化执行,是校企合作和产学研结合的良好示范。
参考文献:
1、Li Li, Can Zhao, Xiao Wang, Zhiheng Li, Long Chen, Yisheng Lv, Nan-Ning Zheng, Fei-Yue Wang*, "Three principles to determine the right-of-way for AVs: Safe interaction with humans," IEEE Transactions on Intelligent Transportation Systems,

2、Li L, Peng X, Wang F Y, et al. A situation-aware collision avoidance strategy for car-following[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(5): 1012 -1016.
3、Meng Y, Li L, Wang F Y, et al. Analysis of cooperative driving strategies for nonsignalized intersections[J]. IEEE Transactions on Vehicular Technology, 201 7, 67(4): 2900-2911.
4、L. Li, F.-Y. Wang, A survey of traffic control with blind crossings using intervehicle communication [J]. IEEE Transactions on Vehicular Technology, 55, 1712-1724, 2006.
李力, 王飞跃, “地面交通控制的百年回顾和未来展望”, 自动化学报, 2018, Vol. 44, No. 4, pp. 577-583.
原文标题:平行驾驶联合研发团队提出基于路权分配原则的自动驾驶广义决策框架


-
小米公布“可穿戴设备召唤车辆”专利:不用你找车,直接车找你2022-04-20
-
交通运输部:全国统一式样重点物资运输车辆通行证公布2022-04-20
-
人类的悲欢并不相通:马斯克为了事业急着复工复产,李斌为了生活以葱换盐2022-04-18
-
免征车辆购置税!35款纯电/6款插电,比亚迪海豹、一汽丰田bZ4X等在列2022-04-12
-
小米车辆专利获授权,涉及无人驾驶技术2022-04-07
-
特斯拉HW4.0计划:芯片、ISP一起改进,比人类驾驶安全10倍2022-04-07
-
爱驰汽车回应成都车辆起火2022-04-06
-
比亚迪在哥伦比亚交付406辆电动大巴,当地运营车辆已超千辆2022-04-06
-
全州33个充电桩66个充电终端(枪)投用 日均可服务1600台新能源车辆2022-03-31
-
何小鹏说的智能化下一阶段,人类还有没有资格开车?2022-03-30
-
自动驾驶的跨场景商业化:攀登珠峰,沿途下蛋2022-03-25
-
社会车辆可错峰充电 今年内重庆中心城区公交站场充电桩将达1271个2022-03-16
-
如何构建智能驾驶泛场景数据体系?2022-03-08
-
山东淄博将于今年打造200辆氢燃料电池汽车应用场景2022-03-08
-
西门子针对零部件供应商车辆系统集成指导2022-03-02