
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
数字式光伏电池阵列模拟器的研制
来源:江南网页版登录入口官网下载
网
时间:2016-06-15 08:22:22
热度:
数字式光伏电池阵列模拟器的研制 摘要:本文在详细介绍太阳能电池的工作原理及其数学模型的基础上,选择半桥变换器作为主电路拓扑,研制了一台光伏电池阵列模拟器。控制部分采用TMS320
摘要:本文在详细介绍太阳能电池的工作原理及其数学模型的基础上,选择半桥变换器作为主电路拓扑,研制了一台光伏电池阵列模拟器。控制部分采用TMS320F2812 DSP作为模拟器控制电路的主控制器,将数字PI控制算法应用在数字式光伏电池阵列模拟器中。在闭环实验下,模拟器的静态工作点与所模拟的太阳能电池的输出特性相吻合,并能够动态模拟负载变化的工作情况。证明了所设计的模拟器能够用于光伏发电系统实验。
1 引言
太阳能作为一种新型的可再生资源受到越来越广泛的重视,但在光伏系统的研发过程中,太阳能电池阵列由于实验受到日照强度、环境温度的影响,导致实验成本过高,研发周期变长。光伏电池阵列模拟器可以大大缩短光伏系统的研究周期,提高研究效率及研究结果的可信性。
本文设计的光伏电池阵列模拟器以半桥电路为基础,基于DSP控制,并加入了PI控制改善系统动态性能和稳态精度。
2 太阳能电池的工作特性
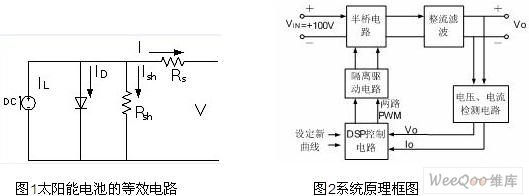
太阳能电池在有光照条件下,光生电流会流过负载,从而产生负载电压。这时太阳能电池的等效电路如图1所示。其中,RS为串联电阻,Rsh为旁漏电阻,也称跨接电阻,它是由体内的缺陷或硅片边缘不清洁引起的。显然,旁路电流Ish和二极管的正向电流ID (通过PN结总扩散电流)都要靠IL提供,剩余的光电流经过RS,流出太阳能电池而进入负载。
根据文献资料[1],利用厂家提供的短路电流Isc,开路电压VOC,最大功率点处的电流Im和最大功率点处的电压Vm这四个参数可以得到太阳能电池板便于工程计算的模型:
这样,就把太阳能电池板的I-V特性曲线转换为简单的、便于工程计算的形式。
3 光伏电池阵列模拟器设计
模拟器的目的是要能模拟一定光照下,随负载变化的太阳能电池板的电特性,包括最大输出功率,输出I-V特性,以及不同日照下的变化。其应该完成以下三个方面的要求:
(1) 系统能够按照光伏阵列的输出特性完成输出,当外电路负载一定时,系统能够在工作点上保持稳定的输出;
(2) 当外接负载发生变化时,模拟器能够以合乎要求的速度变化到新工作点并能稳定在该点;
(3) 能够输出要求的功率;
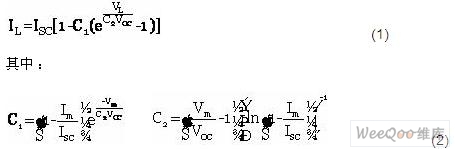
本文设计的光伏阵列模拟器的系统结构框图如图2所示,整个系统主要由功率电路和采集控制电路两部分构成。功率电路采用半桥拓扑,用以完成直流变换,经整流滤波后,产生合适的输出电压。检测电路实时采集输出电压、电流,并送给DSP控制电路。DSP依据采集到的值,产生合适的占空比信号控制半桥两个IGBT开关。隔离驱动电路用于驱动IGBT开关,并实现与控制电路的隔离。如果想要模拟一条新的太阳能电池板I-V曲线,只需在软件中重新设定该曲线的和,这四个参数就可以了。
由于半桥母线电压为100V,单个管子承受耐压应该在100V以上,系统最大输出电流为3.5A。综合以上因素后,我们选择Infinion公司生产的IGBT单管IKW40N120T2,其耐压1200V,可通过的均值电流40A,且该单管价格便宜,开通、关断时间极短,开通压降只有1.7V,因此,开关损耗较小,是较理想的选择。
在本系统中,一共需要四路采集,分别是半桥高低端电压采集,输出电压电流采集。这四路信号都要设定过压或过流保护。采集电流信号使用电流传感器,采集电压信号使用电阻分压的形式。本设计的采集电路使用差分信号传输,并基于三级采集电路设计:首先使用全差分放大器LTC1992进行单端到差分信号的转换;然后使用模拟线性光耦HCPL7840进行信号隔离;最后使用仪用运放INA121将信号进行适当放大。
4 控制算法实现
4.1 寻找负载工作点的算法设计
光伏模拟器主要是跟踪负载的工作点,使得模拟器在不同负载情况下的输出能满足光伏阵列的输出特性。静态工作点的确定是模拟器的关键,如何在一特定负载下快速寻找到期望工作点,并使电源工作在这个点上。当负载变化,或是环境条件变化时,又如何找到新的工作点,并快速且精确的控制电源运行在这个工作点上,是模拟器控制算法所要解决的核心问题。
当负载电阻确定后,想要确定工作点处的电压电流,需要代入式(1)进行计算,但公式复杂,且涉及指数运算,在程序实现上十分麻烦,而且也会影响系统响应的速度。从我们研究太阳能电池的输出I-V特性曲线可以看到,在短路电流点附近,电池板接近恒流,输出I-V曲线在这一段接近一条直线;在开路电压点附近,电池板接近恒压,输出I-V曲线在这一段也接近一条直线。所以我们用四条直线来对电池板输出I-V曲线进行拟合,如图3所示。
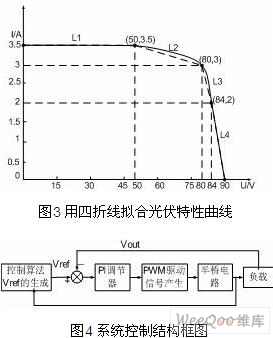
只要我们采集输出电压电流,得到负载电阻,其伏安特性曲线是一条通过原点的直线,这一直线与上面某一条直线必然交于一点,这一点就是我们系统的理想工作点。然后再根据这一点的电压和半桥公式就能得到系统需要发出的占空比。
4.2 PI控制算法在模拟器中的应用
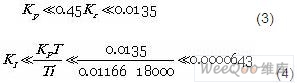
为了提高系统速度和减少静态误差,在控制系统中应用了PI控制算法,本设计的控制结构见图4。根据上文的控制策略,从测得的输出电压电流,可以得到输出负载RL,进而得到参考电压Vref,它与实际输出电压相减送入PI控制器中,PI输出控制调节占空比,进而使实际输出电压与Vref一致。
依据振荡法,对PI参数进行了整定。先让积分常数为零,比例系数KP 由小增加到0.03时,示波器观察输出压开始出现等幅振荡,振荡周期为0.014s,则,
进而得到:
将上述得到的理论、代入程序中,运行测得输出几乎与理论值一致,偏差基本都在0.3V以内,证明了我们整定的参数是成功的。
4.3 软件主程序流程图
系统的控制工作是由软件部分完成的。软件系统的工作主要有两点:一是采集数据;二是完成占空比的计算。主程序模块中主要是进行系统初始化工作及等待处理中断,其中系统初始化主要包括ADC模块的初始化和事件管理器EVB模块的初始化。主程序流程图见图5。
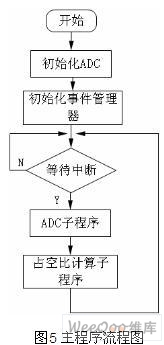
表1 变负载时的输出电压

5 实验结果
基于前面各章对硬件设计、算法、软件编程等方面的研究,设计了一台光伏电池阵列模拟器,其技术参数为:
5.1 模拟器系统的静态效果
为了验证系统输出是否能模拟出一条理想的太阳能电池的输出I-V特性曲线,需要测试RL取不同值时,输出的工作点情况。依据四折线法,RL确定后,就能确定理论的输出电压。依照以上方法进行了一组不同负载实验,测试的数据如表1所示。
由表1可以看到,系统输出电压在69.4V以上时,系统工作在最大功率点附近和开路电压附近,这时系统输出精度基本都在1%以下。说明我们设计的光伏电池阵列模拟器能够在变负载时,比较精确的模拟出太阳能电池阵列的输出I-V特性曲线
5.2 模拟器系统的动态效果
设计光伏电池阵列模拟器的最终目的是要用于光伏逆变系统实验,因此,只在静态情况下描出太阳能电池板输出I-V特性曲线是不够的,还需要用实验检测系统的响应速度,即动态特性。
影响本系统动态响应时间的因素主要有两个:一是输出电容的电压惯性;二是系统软件算法的执行时间。我们做了两个实验,一是负载突变时,看输出电压的变化;二是直接接光伏逆变系统,让逆变器按照最大功率点跟踪算法(MPPT)去测试模拟器的性能。如果逆变器能跟踪到最大的功率,则说明我们的模拟器达到了设计指标。
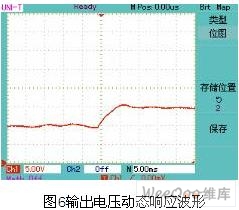
我们将负载电阻进行突变,输出电压也会变化。图6是在模拟开路电压为40V时,负载电阻由21.6 Ω突变到49.5 Ω时,输出电压由31.6V跳变到36.1V时的动态响应波形。由图6可以看到,输出电压可以在约8ms的时间里完成变化响应,但是,这个速度到底够不够,还要看接上实际逆变器后的效果。
在逆变器前端是BOOST电路,用以实现MPPT算法。BOOST电路输入端与我们设计的模拟器相连后,输出端接一电阻。首先让模拟器工作,测量此时输出为开路电压。然后,BOOST电路开始工作,执行MPPT算法。实验测量,BOOST输入电压由开路电压90V逐渐减小,最终在最大功率点电压80V处基本稳定,证明找到了模拟电池的最大功率点。
6 结论
本文在研究了太阳能电池的数学模型的基础上,结合电力电子技术和控制技术,给出了一个基于微控制器和DC/DC环节的光伏阵列模拟器的设计。实验证明,模拟器样机可以有效的模拟光伏阵列的输出,输出特性可以比较准确的模拟光伏阵列,输出电压、电流较稳定。
来源:大力士


-
燃料电池电动汽车的缺点2023-11-30
-
燃料电池汽车工作原理2023-11-30
-
燃料电池汽车特点2023-11-30
-
燃料电池汽车关键技术2023-11-30
-
中国氢燃料电池汽车落后国外5—10年2023-11-30
-
通用氢燃料电池汽车有望提前量产2023-11-30
-
燃料电池车,是在侮辱谁的智商?2023-11-30
-
电动车的生机远远大于燃料电池汽车2023-11-30
-
燃料电池客车最有希望率先商业化2023-11-30
-
“十三五”电动汽车展望 电池决定发展重点2023-11-30
-
燃料电池汽车前景如何2023-11-30
-
揭秘三元锂电池火线叫停背后的真相2016-06-22
-
电池技术提升方能让电动汽车更环保2016-06-22
-
电池目录备选由来已久 “外资”企业躺枪2016-06-22
-
续航大调查 揭秘特斯拉电池衰减的真实性2016-06-22