
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
DSP在交流异步电动机变频调速中的应用
来源:江南网页版登录入口官网下载
网
时间:2016-06-13 19:12:45
热度:
DSP在交流异步电动机变频调速中的应用 目前交流调速电气传动已经成为电气调速传动的主流。随着现代交流电机调速控制理论的发展和电力电子装置功能的完善,特别是微型计算机及大规模
目前交流调速电气传动已经成为电气调速传动的主流。随着现代交流电机调速控制理论的发展和电力电子装置功能的完善,特别是微型计算机及大规模集成电路的发展,交流电机调速取得了突破性的进展。
恒压频比(U/F=常数)的控制方式是转速开环控制,无需速度传感器,控制电路简单,负载可以是通用标准异步电动机,所以通用性强,经济性好,是目前通用变频器产品中使用较多的一种控制方式,普遍应用在风机、泵类的调速系统中。
电压空间矢量法(SVPWM),也叫“磁链跟踪控制”,和经典的SPWM控制着眼于输出电压尽量接近正弦波不同,它是从电动机的角度出发,着眼于如何使电机获得幅值恒定的圆形旋转磁场。
本系统设计了以TMS320LF2407A为中央处理器的硬件平台,通过SVPWM控制方法对交流电机实现恒压频比控制。并在此基础上给出了变频调速控制系统的软件设计。
1 空间电压矢量PWM原理
理论分析表明:三相对称正弦电压产生幅值恒定、以恒转速旋转的电压空间矢量,而这种电压空间矢量加到电机上时将产生幅值恒定、以恒转速旋转的定子磁链空间矢量,且定子磁链矢量顶点的运动轨迹形成圆形的空间旋转磁场。因此,电动机旋转磁场的轨迹问题可转化为电压空间矢量的运动轨迹问题。
SVPWM法就是从电动机的角度出发,把逆变器和交流电动机视为一体,着眼于如何使电机获得幅值恒定的圆形旋转磁场。
1.1 基本电压空间矢量
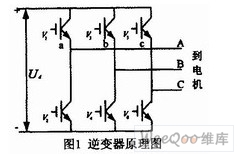
图1是一个通用的电压型PWM逆变电路。
图中的V0-V5是6个功率开关管,a、b、c分别代表三个桥臂的开关状态。对于每一个桥臂都有两种工作状态,“上管导通,下管关断”,称为“1”状态,“下管导通,上管关断”,称为“0”状态。三个桥臂只有“1”或“0”两种状态,因此a、b、c形成000、001、010、011、100、101、110、111共八个开关模式。其中000和111开关模式称为零状态。
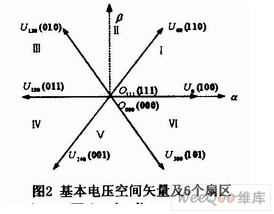
8个开关模式分别对应8种基本电压矢量。根据其相位角的特点分别命名为:O000、U0、U60、U120、U180、U240、U300、O111。按6个有效工作矢量将电压矢量空间分为对称的6个扇区,如图2所示:
1.2 电压空间矢量的合成
每个有效工作矢量在一个周期内只作用一次的方式只能生成正六边形的旋转磁场,如果设法使定子里形成正多边形旋转磁场,我们就可以得到近似的圆形旋转磁场。而且,正多边形的边越多,近似程度就越好。
但是如果想获得尽可能多的多边形旋转磁场,就须有更多的逆变器开关状态。我们可以利用六个非零的基本电压空间矢量的线性时间组合来得到更多的开关状态,这就是电压空间矢量PWM的基本思想。
在电压矢量空间的6个扇区中,当期望的输出电压矢量落在某个扇区时,就用该扇区的两条边等效合成期望的输出矢量。
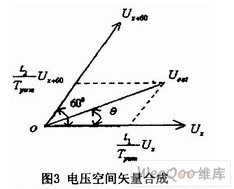
在图3中,Ux和Ux±60代表相邻的两个基本电压空间矢量;Uout是输出的参考相电压矢量,其幅值代表相电压的幅值,其旋转角速度就是输出正弦电压的角频率。Uout可由Ux和Ux±60线性时间组合来合成,它等于t1/Tpwm倍的Ux与t2/Tpwm倍的Ux±60的矢量和。其中t1和t2分别是Ux和Ux±60和作用的时间;Tpwm是Uout作用的时间。
由期望输出电压矢量的幅值及位置可确定相邻的两个基本电压矢量以及它们作用时间的长短,并由此得出零矢量的作用时间大小。
2 基于DSP的变频调速系统硬件电路设计
设计的系统以TMS320LF2407A为核心控制器,电路组成包括主电路、系统保护电路和控制电路三大部分,其总体设计图如图4所示。
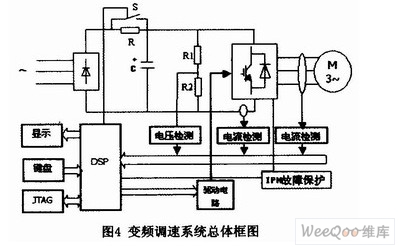
其中主电路部分由整流电路、滤波电路、逆变电路租IPM驱动电路组成。主电路工作原理是把三相交流电源通过三相桥式整流电路变换为脉动的直流电压,再经过大电容C滤波后成为平滑、稳定的直流电压。再通过IPM逆变电路将该直流电压变换为频率、电压均可调的交流电,形成PWM波,提供给负载电机。
系统保护电路包括泵升电压控制,过压、欠压保护,限流启动和IPM故障保护等。过压、欠压保护是利用电阻分压采集母线电压,与规定值相比较,以保证电压型逆变器母线电压稳定;限流启动是为了防止开启主回路时瞬间的大电流可能会损坏整流电路中的二极管,在主回路上串联一个限流电阻R,当电容电压达到规定值时,通过继电器把R短路,主回路进入正常工作状态。
控制电路包括DSP最小系统电路、光耦隔离电路等。最小系统由DSP本身和外扩的数据SRAM、程序SRAM、复位电路、晶振、译码电路、电源转换电路组成,光耦隔离电路是为了把DSP输出的弱电信号和主电路的强电信号进行可靠隔离。
3 基于DSP的变频调速系统软件设计
TMS320LF2407A DSP最大的特点是内置了一个功能强大的事件管理器模块(Event Manager)。EM模块中有内置的硬件电路以最大限度地简化对称空间向量PWM波形的产生。
一个电压空间矢量PWM波的生成,对零矢量使用方法很灵活。通常以开关损耗较小和谐波分量较小为原则,安排基本矢量和零矢量的作用顺序,一般在减少开关次数的同时,尽量使PWM输出波形对称,以减少谐波分量。
本文采用最常用的是七段式电压空间矢量PWM波形,它由3段零矢量和4段相邻的两个非零矢量组成,将零矢量分别置于PWM波的开始、中间和结尾。
在这个程序中,调制波频率f由外部输入,并假设已经通过f/50 Hz转化成频率调节比的形式。程序中的载波频率和采样频率都是20MH-z。可以实现调制波频率0~50Hz变频功能、死区功能。死区时间1.6μs。DSP晶振10MHz,内部2倍频,时钟频率为20MHz,计数周期为50ns。
3.1 主程序设计
主程序的工作是初始化,并将外部输入的频率调节比转换成角频率。根据U/F曲线确定参考电压的幅值。

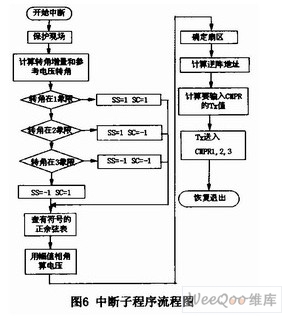
3.2 中断子程序的设计
中断子程序的工作是在每一个PWM周期里,计算出下一个PWM周期的三个比较寄存器的比较值,并送入到比较寄存器中。三相SVPWM波由DSP的PWM1~6引脚输出。
4 实验结果
基于以上软、硬件设计,构成变频器对交流异步电机进行变频调速。实验对象为鼠笼式异步电机,其参数如下:型号:JO-11-2,额定功率1kW,额定电压380V,额定电流:2.31A。实验中的波形由数字示波器测得。实验过程测试了在不同频率输出时电机的电流,从实验波形可以看出,其输出电流基本是正弦波。

5 结束语
本文在空间电压矢量控制技术的基础上,设计了转速开环的变频调速控制系统,给出了变频调速控制系统的软件设计。通过试验表明,此系统控制性能和精度良好。
来源:森林
上一篇:便携式环境测试仪电源电路设计


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
用DSP控制电动车电池管理系统的研究2016-06-15
-
基于DSP 的电动机保护器的设计与实现2016-06-13
-
基于dsPIC30F的数字式交流异步电动机变频调速系统设计2016-06-13
-
基于DSP+CPLD的异步电动机控制系统开发平台设计2016-06-13
-
基于DSP的无刷直流电动机的模糊控制系统方案2016-06-13
-
一种基于DSP的三相异步电动机故障监测的探索2016-06-13
-
用DSP控制电动车电池管理系统的研究2016-06-13
-
基于DSP控制的无刷直流电机的电动执行器的设计2016-06-13
-
三相异步电动机绕组故障分析和处理2016-06-13
-
基于DSP的无刷直流电动机的模糊控制系统研究2016-06-13
-
交流异步电动机的矢量控制系统设计方案2016-06-13
-
如何正确保养纯电动汽车电池?2016-06-10
-
纯电动汽车在中国真的会火吗2016-06-10