
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
基于DSP 的电动机保护器的设计与实现
来源:江南网页版登录入口官网下载
网
时间:2016-06-13 19:12:21
热度:
基于DSP 的电动机保护器的设计与实现 0 引言 电动机作为一种拖动机械,由于供电状态和生产负荷的多变性,以及电动机经常在频繁起动、制动、正反转等工况条件下运行,所以容易
0 引言
电动机作为一种拖动机械,由于供电状态和生产负荷的多变性,以及电动机经常在频繁起动、制动、正反转等工况条件下运行,所以容易发生过载、堵转、短路、断相等故障。传统的电动机保护,已难以满足人们对电动机保护越来越高的可靠性要求。随着单片机技术、通信技术的发展,以及智能化电动机保护技术的深入研究,电动机保护器开始向通信网络化、装置微机化、功能集成化等方向发展。
为实现电动机的可靠保护,本文介绍一种以DSP 为核心控制单元,集测量、诊断、保护、控制、总线通信功能于一体的智能型电动机保护器的设计与实现方法。
1 电动机保护原理
电动机的故障分为内部故障和外部故障,常规的外部保护无论从理论上还是诊断与保护的实现方法上都相对完善。电动机内部故障又分为对称故障和不对称故障。对称故障对电动机的影响主要是因电流增大而引起的热效应的积聚。可以利用过电流检测和对电动机绕组的温升特性进行数学建模,实现对对称故障的诊断。电动机发生不对称故障时,其定子电流可以分解为正序、负序和零序分量,其中,负序和零序电流在电动机正常运行时几乎为零。因此,利用电流序分量的检测方法来鉴别各类通过对不对称故障具有很高的灵敏度和可靠性。
该设计在线测量了电流真有效值、电机外壳温度以及电动机热力学参数,通过建立数学模型,仿真计算出电机定子绕组的温度,并结合软件算法求取序分量,判断不对称故障实际应用中,构成了对电动机在各种运行环境下所有类型的故障诊断与保护。
1. 1 基于交流采样的真有效值计算
对于周期为T 的工频信号来说,在一个周期内采样N 点,得到离散序列立u( n)、i( n)。当满足香农定理时,u( n)、i(n) 中将包含工频交流信号中有关电参量的信息,并由数值积分理论计算出工频信号的电参量。
如果交流电流信号在1 周期内均匀采样N点,只要N 足够大,且选取适当,则交流电流的有效值公式:
离散化,以1 周期内的采样序列来代替连续变化的电流值。根据数值积分中的矩形算法,得:

式中:ΔT 为交流采样间隔;im为电流采样样本值;N 为1 个周期内的采样点数。
如果相邻2 次采样的时间间隔都相等,则:

1. 2 序分量检测
当系统出现故障或其他原因造成系统不对称运行时,一般采用对称分量法,将一组不对称分量分解为三组对称的分量,分别为正序、负序和零序分量。将该几组对称分量分别作用在对称阻抗上,计算出个别的对称情况对电动机产生的影响,再把结果叠加起来,得出总的结果。
当电力系统正常运行时,其三相对称电势表示式为:
电力系统发生不对称故障时,根据对称向量法,序分量与不对称分量存在如下关系:
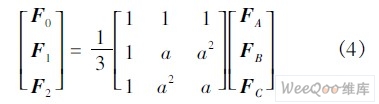
则:
1. 3 等效热保护
电动机的发热和散热过程比较复杂,与固定损耗及可变损耗等多种因素有关。根据对电动机发热过程的分析,其热态平衡微分方程为:

式中:Q 为电动机单位时间产生的热量;A 为散热系数(表示温升为1 ℃时,每秒钟的散热量);τ 为温升;t 为时间;Aτ 为电动机单位时间内散热量;C为电动机热容量。
由式(6) 解得,在初始条件下,t = 0,τ = τF0,电动机在某一时刻的温升由下式决定:

式中:Tθ = C /A 为发热时间常数,表示热惯性的大小;τL = Q/A 为温态温升;τF0为起始温升。
式(7) 表明,热过渡过程包括2 个分量,一个是强制分量τL,是过渡过程结束时的温态值;另一个是自由分量 ,按指数规律衰减至0。
,按指数规律衰减至0。
在本设计中,根据IEC 255-8 建立室温状态下电动机发热曲线模型,脱扣级别分为多级可选,与不同起动时间的负载类型相对应,如图1 所示。
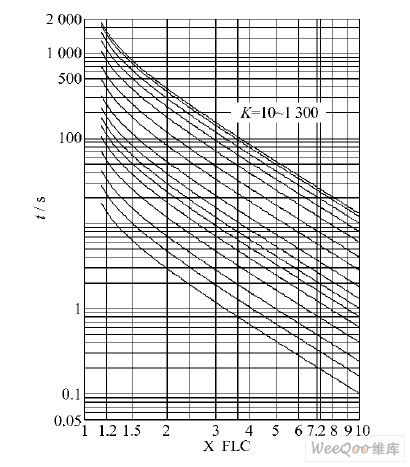
图1 过负荷时间/电流曲线。
电动机热衰减过程受环境因素的影响比较大,不同的环境温度条件下,单位时间内的散热量是不一样的。式(7) 反应了电动机热量衰减规律,在本设计中,电动机的散热过程按式(7) 模拟指数函数曲线衰减方式,并针对不同的电动机提供多条散热曲线可选。实际应用中,选取三种典型的电动机散热过程,在不同环境温度下,通过试验的方式确定式(7) 中的发热时间常数Tθ值,并推广至普遍应用。试验数据表明,可较为真实地反应不同环境温度条件下电动机的散热过程。因试验过程比较复杂,本文就不再赘述。
2. 4 温度测量
电动机的发热与散热过程和环境温度是息息相关的。电动机是否需要保护,其根本的判断依据应该是电机绕组温度是否超过其绝缘等级温度,在相同电流的情况下,对于环境温度高的电动机,其烧毁的可能性显然要大于环境温度低的电动机。本设计中,在电动机等效热保护模型中引入电动机环境温度的影响。式(6) 中散热系数A由电动机外壳温度确定。
电动机外壳温度采集部分采用恒流源电路。
温度敏感元件使用铂电阻。温度的标度变换采用查表和线性插值相结合的方法。
2 系统构成
系统构成原理图如图2 所示。
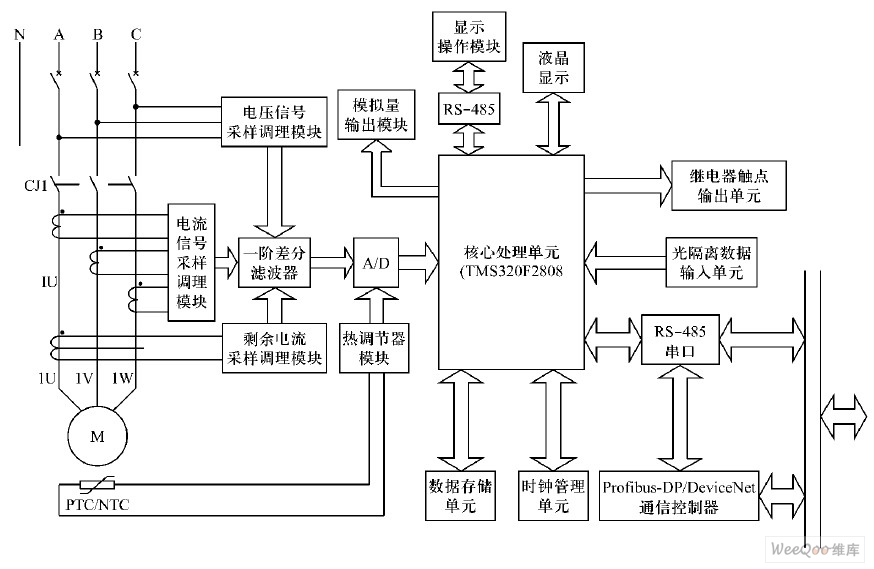
图2 系统构成原理图。
2. 1 微处理单元
传统的保护器常采用以单片机为核心的处理单元,但单片机采用的是冯·诺依曼结构,程序指令和数据共用一个存贮空间,所以无法进行实时、高速采样和实时处理,限制了测量精度。
核心处理单元使用了数字处理芯片(DSP)TMS320F2808。基于TMS320F28xx 内核的定点DSP TMS320F280x 系列是集成度较高、性能较强的控制系列器件。能实时采样、快速提供电能质量参数,为电力系统全面的测量和分析提供了有效的工具。高速的运算能力保证了的实时性。
2. 2 电信号采样单元
电流信号取样于套在母线上的电流互感器的二次输出,为达到一定的测量精度,必须足够高的采样频率和足够长的数据信息。本设计中,采用每周期64 点的采样机制,同时,在采样调理电路中使用二阶抗混叠低通滤波器,滤波器的截止频率选择在1 600 Hz;采样电路使用Microchip 的MCP6004 运算放大器,增益带宽1 MHz;电路形式为一阶低通滤波放大器,如图3 所示。采样电路的差模放大输出为uo = uiZ /R + U0,其中,Z 为阻抗。选择阻容并联形式,则Z 的传递函数为:

一阶差分低通滤波放大器静态放大增益为:

为避免放大器在大电容负载时的不稳定,在输出端加入一个小电阻Riso,从而提高放大器反馈回路在大电容负载下的相角裕度。
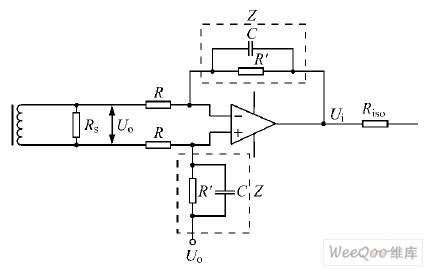
图3 电流采样调理电路。
2. 3 继电保护输出
继电保护是通过继电器触点输出完成。当保护器诊断到电动机发生故障时,就触发功率电路,驱动继电器输出,以切断电动机电源,使电动机处于保护状态;同时,通过识别与记忆功能对故障予以识别、记忆和指示,以便分析原因并进行日常维护。只有当故障排除后,电动机才能再次被起动。
2. 4 显示操作单元
显示操作单元提供友好的人机界面。它通过串行接口与保护器连接,主要包括键盘输入模块、液晶显示模块、指示灯与复位按钮等。定值整定和测量值监视、状态监控、自诊断信息等本地操作均通过显示操作模块进行。
2. 5 通信接口
TMS320F2808 提供2 个两线异步通信接口(SCI)模块,即通常所说的UART,支持CPU 与其他异步外设间的数字通信,接收或者发送的数据是NRZ 格式。保护器串行通信接口选择2 根线的RS - 485 硬件接口,在该结构中,多达32 个从机装置能在一条单一的通信信道上用菊花链结构方式连接在一起,实现保护器和计算机监控系统间的实时通信。
3 软件设计
保护器软件部分的设计主要采用嵌入式C语言,结构清晰,方便升级和移植。程序框架以主程序为核心,包括初始化程序、系统自诊断、主程序、定时中断程序和各个功能模块子程序,各子程序的功能均在主程序中得到实现。如图4 所示。
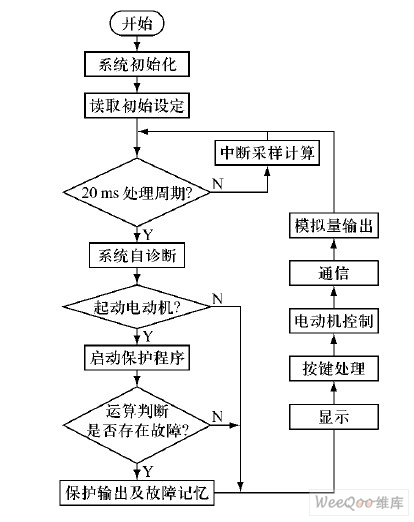
图4 主程序流程框图。
3. 1 软件抗干扰
由于DSP 器件的高速特性,使电参数的测量精度和抗干扰技术都能提高到一个新的水平。在软件设计中,采用信号完整性分析方法,以提高抗干扰水平,并采用软件滤波算法对采样信号进行软件非线性校正。对于采集到的每路信号,则使用有限冲激响应滤波器。
对于一个M 抽头的FIR 滤波器,第n 个输出为:

其中,h(k) 称为滤波器系数,又叫滤波器的冲击响应。用于滤波器系数的h(k)相越多,对理想低通滤波器响应的近似程度就越高。本设计中,FIR 滤波器采用65 抽头结构,在其通带频率区间上,信号的相位延迟为180°,滤波器的截止频率为550 Hz。滤波器的冲击响应h(k) 通过Matlab设计获得。
3. 2 通信
保护器实现了Modbus-RTU 串行通信标准的一个子集。许多流行的可编程控制器直接使用一个合适的接口卡保护器相联。Modbus 是单主机对多从机,不受硬件约束,适合由RS - 485 硬件接口提供的多结构的规约。对于其他通信协议,保护器则采用外置式通信转换模块来实现。
4 应用
基于DSP 的电动机保护器的设计方案已在实际产品中实现,如图5 所示。通过3C 认证试验验证,各项功能均达到设计要求,对电动机的各种故障有良好的保护效果。保护器在采样、整定、保护精度方面有了质的飞跃,保护可靠性高,不易受环境影响。

图5 RMD2 电动机保护器。
RMD2 电动机保护器具有以下特点:
(1) 高精度电参数测量;
(2) 完善的保护特性:可对十余种电动机故障进行诊断与保护;
(3) 基于电动机环境温度的热等效保护;
(4) 多种逻辑控制功能:可实现双向控制、星- 三角起动或软起动器配合起动等9 种逻辑控制;
(5) 总线通信。
基于DSP 设计的RMD2 电动机保护器取得十项专利,其中发明专利二项,获上海电气( 集团)总公司科技进步三等奖。经中国科学院上海科技查新咨询中心查新,RMD2 电动机保护器在国内处于领先,达到国际先进水平。
RMD2 电动机保护器在江苏盐城某化工厂生产车间已实现稳定的运行一年多时间,能够达到很好的远程监控目的,实现对电动机的保护与控制、故障处理与记录,具有较高的保护精度和灵敏度,取得了良好的经济效益。
(1) 利用低电流特性来检测吸力的消失或排气阀的关闭,实现对泵的机械式保护。
(2) 利用起动定时器来断开回路防止过度超时运行,实现对压缩电动机的电气保护。
(3) 使用机械阻塞跳闸特性来反应机械堵塞故障实现对传动装置的机械保护。
5 结语
与传统的电动机保护装置相比,基于DSP 的电动机保护器则充分利用了DSP 的资源,是一种集测量、诊断、保护、控制和通信功能于一体的智能型综合保护控制装置。保护特色的多样性及简单的编程控制使其成为广泛应用领域内的电动机及设备保护的选择。
参考文献:
[1]. Microchip datasheet http://www.dzsc.com/datasheet/Microchip+_1097736.html.
[2]. MCP6004 datasheet http://www.dzsc.com/datasheet/MCP6004+_1097507.html.
来源:LIDY


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
交流电动机调速技术2016-06-13
-
基于dsPIC30F的数字式交流异步电动机变频调速系统设计2016-06-13
-
小功率低成本直线电动机专用变频器设计2016-06-13
-
基于CAN 总线的电动机保护装置的设计2016-06-13
-
基于DSP+CPLD的异步电动机控制系统开发平台设计2016-06-13
-
A4938:三相无刷直流电动机预驱动器2016-06-13
-
基于DSP的无刷直流电动机的模糊控制系统方案2016-06-13
-
一种基于DSP的三相异步电动机故障监测的探索2016-06-13
-
TMS320C2812在无刷直流电动机控制中的应用研究2016-06-13
-
一种电动机智能控制与保护装置的设计2016-06-13
-
低压智能电动机保护器的可靠性研究2016-06-13
-
用DSP控制电动车电池管理系统的研究2016-06-13
-
基于DSP控制的无刷直流电机的电动执行器的设计2016-06-13