
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
基于LPC2132的双驱电动车控制系统设计(二)
来源:江南网页版登录入口官网下载
网
时间:2016-06-13 19:10:07
热度:
基于LPC2132的双驱电动车控制系统设计(二) 3.2 全桥驱动电路的逻辑控制电路 换相控制逻辑包括根据当前转子的位置控制电桥上下桥臂,正确给出绕组通电;通过对绕组通电的时间
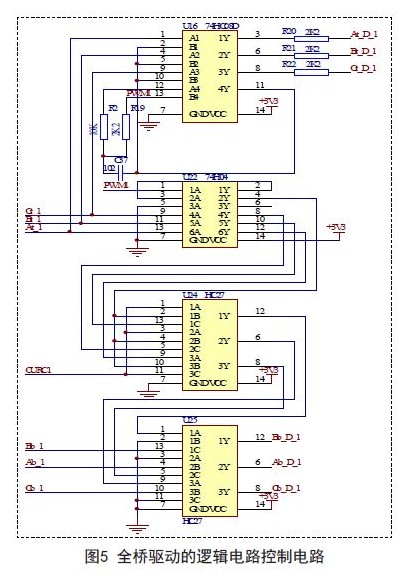
3.2 全桥驱动电路的逻辑控制电路
换相控制逻辑包括根据当前转子的位置控制电桥上下桥臂,正确给出绕组通电;通过对绕组通电的时间比例控制速度;对电桥实施死区保护,防止烧毁MOSFET和驱动电路.所以设计的逻辑控制电路具有以下特点:采用逻辑门电路与RC延时电路,避免了控制时出现死区;另外增加了电机绕组续流功能,保护了控制管.两个电机的电桥逻辑控制电路一样,这里给出了其中一路,如图5所示.
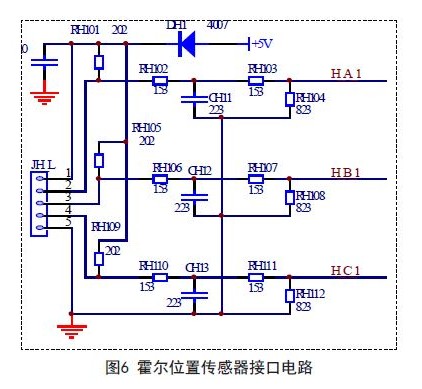
3.3 霍尔位置传感器接口电路
无刷电机内置的三个位置传感器(霍尔)采用5V电源供电,由于电机内部电磁场的作用以及工作时的干扰,对霍尔位置传感器及其电路的电源要求非常高,这里我们采用独立电源供电,此外对传感器脉冲检测电路进行了滤波处理(同时在软件中也做了相应的处理),以提高抗干扰能力,这里图6霍尔位置传感器接口电路仅画出其中一路,具体电路如图6所示.
3.4 电桥驱动电路设计
如图7所示,全桥驱动电路的每一相都由上.下臂组成,这里给出了其中一相的电原理图.
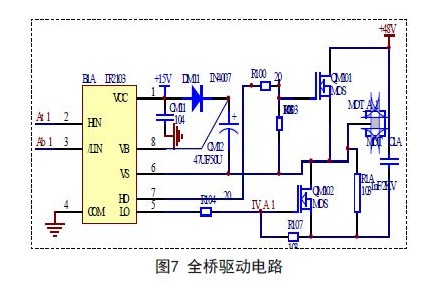
其中上桥的控制信号高电平有效,下桥的低控制信号电平有效.针对MOSFET的D-S导通时存在导通电阻Ron,同时考虑电机工作电流较大,这里采用专用驱动芯片IR2103,可以解决死区保护等各种问题.
限于篇幅,其它接口包括串口通信.模拟采集.油门电路输入.转弯电压输入.过流采样.电池电压采样等原理图没有一一列出.
4.控制软件设计
为了实现对电动汽车的智能控制,本系统中软件包含以下功能模块:两个无刷直流电机位置检测模块.电机换相逻辑控制模块.速度调节模块(转速采样.PWM正转和反转.PID控制等).安全管理模块.电子差速转弯模块.串口通信模块等功能.系统软件编程采用模块化结构,以增加调试的灵活性.修改的方便性.移植的通用性.软件包括主程序.中断程序和相应的功能子程序.主程序流程图如图8所示,主程序主要完成对控制寄存器.数据信息单元的初始化以及对各模块的响应.程序启动后首先是进行初始化,然后对电机状态检测并进入启动模块以及速度管理模块,在出现异常时进入安全管理模块,并通过串口向外部发送车辆状态信息.下面简单介绍下几个主要模块.

4.1 系统初始化
本系统采用11.0592MHz(Fosc)晶体振荡器,处理器工作频率为4倍主频即4 4 . 2 3 6 8 M H z;TIMER0的0通道中断实现霍尔位置信号查询以及软件定时,设置为IRQ中断,分配为最高中断优先级,以确保电机换相最快响应;AD转换器频率设置在1MHz,由软件定时启动转换,并采用查询标志位(AD完成标志位)方式确定转换结束并读取转换数据;在PWM通道0产生0.1ms(相当于10KHz)的PWM波,通道2和4在此基础上产生占空比可调的波分别控制两个电机转速;串口以57600的波特率定时向外发送电机相关信息,1个起始位,8位数据,无奇偶校验位,1个停止位.


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
电动车的生机远远大于燃料电池汽车2023-11-30
-
赵航:电动车异军突起 对天然气汽车有影响2023-11-30
-
北汽与松下组建公司 生产低能耗电动车部件2016-06-15
-
试驾比亚迪秦EV300纯电动车:秒速600里(图)2016-06-15
-
北汽或在墨西哥生产电动车 进军美洲市场2016-06-15
-
锂电池用于改装电动车须谨慎2016-06-15
-
分析纯电动车电池管理实训系统2016-06-15
-
比亚迪E6等五大纯电动车口碑评比 谁更得用户芳心2016-06-15
-
戴姆勒计划2020年年均销售10万辆电动车2016-06-14
-
伦敦混动车不再享受优惠政策 电动车得势2016-06-14
-
标致雪铁龙新一代电动车技术曝光 电池容量暴涨11倍2016-06-14
-
松下和北汽联合在天津建电动车零部件工厂2016-06-14
-
中国电动车这么火 2020年电池大量报废后如何回收利用?2016-06-14