中信博烧脑技术解读:如何计算带倾角平单轴跟踪器的最优角度
来源:江南娱乐-意甲尤文图斯亚
时间:2018-12-04 15:02:30
热度:
中信博烧脑技术解读:如何计算带倾角平单轴跟踪器的最优角度众所周知,跟踪器是一种实时追踪太阳的装置。通常来说,使用CAD方式可以计算出跟踪器的最优角度,但是这个方法仅适用于得到一次性
众所周知,跟踪器是一种实时追踪太阳的装置。通常来说,使用CAD方式可以计算出跟踪器的最优角度,但是这个方法仅适用于得到一次性的结果。而对于实时变动的各种角度来说,常规的CAD方式则无法满足跟踪器项目的实际需求。现在,我和大家聊一聊“跟踪算法”,看如何使用理论的方式“一劳永逸”地得到跟踪器最优角度值呢?
一、传统计算带倾角平单轴跟踪器角度的理论方式
熟悉平单轴跟踪算法的朋友,对于计算理论最优角度的方法应该是比较熟悉了。常规而言是通过使用不同的经验公式计算出太阳赤纬角和时角,然后再进一进步推导出太阳的高度角和方位角,最后再利用这两个参数得到平单轴在不同地点不同时间的最优角度。
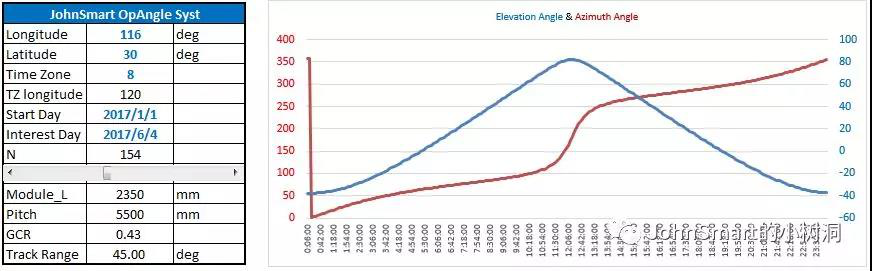
对于普通平单轴跟踪器来说,因为组件与转动轴是相同的平面,计算算法往往使用2维的坐标转换即可完成,也就是使用平面向量。换句话来说,主轴45度,组件就是45度(如下图所示)。
二、新型计算带倾角平单轴跟踪器角度的理论方式
其实,在计算带倾角平单轴跟踪角度时很多实际情况是,当组件带有一定的角度,也就是带倾角平单轴时,计算最优角度则需要使用3维坐标转换公式,也就是空间向量,以保证计算出精准的最优跟踪角度。在这种情况下,举例来说如果主轴45度,组件还是45度吗?背后的理论,我会在下面通过几何原理一步一步来解说三维角度跟踪算法。
1.几何原理
为了方便电机控制平单轴旋转,跟踪器倾角传感器往往都是紧贴旋转轴。主轴旋转角度变化,对于组件平面来说角度也必然会跟着改变。不管是双轴也好,平单轴也好,最优角度其实就是求组件法向量与太阳和组件中心连线的向量之间夹角最小。假设地面为参考坐标系,那么问题就转化为求解组件与地面的夹角。
只不过我们很容易就能发现,带倾角平单轴的组件角度与旋转主轴的角度变化并不是线性一致的。以带15度倾角的平单轴为例(如下图),旋转主轴0度时,组件与地面夹角为15度。

当旋转主轴45度时,组件与地面夹角为46.92度(如下图)。

2.三维跟踪角度算法的原理
这篇文章里介绍的3维坐标转换借鉴了目前可视化行业的计算机3D图形学,简单来说,就是将构建好的3维的物体展示到2维的显示器上。下面,我将阐述一下如何用理论的方法来计算组件与地面的夹角。
假设如下图所示
·组件的原法向量为OP1(x1,y1,z1)
·地面坐标系(X,Y,Z)
·X轴为跟踪器的旋转主轴
·点Q,N,M分别为向量OP1到平面XZ,YZ和XY上的投影点
问题是求当主轴转动一定的角度时,向量OP2与向量OZ的夹角?

从上面的图可以看出来,主轴绕X轴旋转时,组件法向量OP也是绕着X轴旋转,旋转360度则扫出一个圆锥面。而OP投影到平面YZ上的向量ON则长度不变,以O点为圆心旋转。
假设原先ON与Y轴夹角为Alpha,向量OP1(x1,y1,z1),当ON转动Theta角后,OP1坐标变为OP2(x2,y2,z2)。

据此我们可以列出如下左右两对方程组

将右边的那对(y2,z2)方程组展开得到

再将左边那对(y1,z1)方程组带入上面的方程组得到与初始角度Alpha无关的(y1,z1,y2,z2)方程组

再将一直没有露面的x1=x2带入,这样就得到了一个6元非齐次线性方程组

利用行列式“OP2=常数项xOP1”整理下这个方程组得到一个旋转矩阵

至此,关键的计算已经完成了。
三、实例分析带倾角平单轴跟踪器最优角度的计算方法
下面举一个具体的例子,当跟踪器旋转主轴从放平0度转动到45度时,求带倾角15度的组件相对于地面角度。
原组件单位法向量OP1为

1.主轴转动45度,则旋转矩阵为

2.利用行列式OP2=旋转矩阵xOP1得到最终的组件法向量

3.地面的单位法向量为

4.得到两个向量(地面和OP2),可求的其夹角为46.92度。
全过程如下

至此,带倾角平单轴真实角度的计算结束。
目前,中信博拥有一支丰富经验的设计研发团队,以积极推动科技创新,提升企业在全球光伏市场的产品和技术核心竞争力,为客户提供世界领先的光伏跟踪和固定支架系统解决方案。如果您有更多跟踪器方面的信息想和我们进一步互动探讨,欢迎和我们联系。
作者中信博海外设计总工 王敏杰(John Smart)

-
加拿大公布对华光伏双反调查终裁结果2024-08-16
-
中电光伏在韩国再开海外工厂2024-08-16
-
六月订单猛增 太阳能电池厂调涨售价2024-08-16
-
中欧太阳能争端或要“滚雪球”2024-08-16
-
印度打造太阳能火车 替代柴油2024-08-16
-
移动技术+太阳能给非洲带来变革2024-08-16
-
借鉴树根结构 日企开发出适用于光伏电站的简易斜桩基础2024-08-16
-
五月光伏产能达6.4GW创新高2024-08-16
-
上能集散式光伏逆变器再获殊荣,业内首款通过中国效率认证2024-08-16
-
分子石墨烯架构助力有机太阳能电池2024-08-16
-
【两会】关于落实分布式光伏电站发展的三方面建议2024-08-16
-
2015年我国各省光伏装机数据排名及分析2024-08-16
-
国家能源局要求推进风能开发 增强光伏扶贫力度2024-08-16
-
华北地区掀起的户用光伏潮,正泰为你打call2024-08-16
-
光伏新政突拉“电闸” 专家直言:呼吁撤销新政2024-08-16