模块化软体机器人,更柔软灵活
模块化软体机器人,更柔软灵活文/陈根相较于刚性机器人,柔性机器人展现出了其所不具备的优势。柔性机器人具有不同的软硬件体系结构:每个关节都配置力传感器,并且底层控制体系结构由原来的位
文/陈根
相较于刚性机器人,柔性机器人展现出了其所不具备的优势。柔性机器人具有不同的软硬件体系结构:每个关节都配置力传感器,并且底层控制体系结构由原来的位置控制,转变为力和位置融合控制,使机器人兼具高精度位置控制和高动态力控制。
当前,柔性材料的软机器人已广泛应用于各个领域。在许多情况下,为了完成紧急任务(如救援),需要快速制造出适合的软体机器人。现在,浙江大学工程学院教授邹俊就基于刚性机器人仍存在的局限,开发出了一个真空驱动的柔性机器人。

一开始,研究人员提出一种刚柔结合的设计方案 ,即用一个真空驱动的柔性扭转执行器(V-SPTA,Vacuum-Powered Soft Pneumatic Twisting Actuators)作为软体机器人的 “柔性关节”。
真空动力软气动执行器(V‐SPAs)是一种有前景的新兴应用技术,包括人造肌肉、可编程运动和柔性抓手。它们具有灵活的变形、清洁的供电、与用户安全的交互等优点。
但是,在机器的构造方面,研究人员依然采用传统的方式,以至于出现了在给软体机器人吸气的时候,机器人无法把运动完全分离开的情况。
在此基础上,研究人员进一步改进。
在进一步实验设计中,研究人员通过模块组合将复合运动解耦,实现了单个运动。并且,又模仿传统折纸艺术千纸鹤的折叠运动,设计出一种流体驱动的全柔性人工肌肉。这种人工肌肉可以用于不同的软机器人的快速重构,就像“积木”一样。
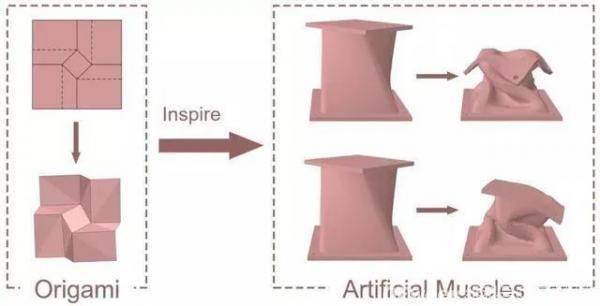
此外,它可以通过直线运动、旋转运动、弯曲运动,去实现所有的运动,为柔性材料软机器人的制造提供了一种简便、快速的方法,大大提高了柔性材料的利用率。
同时,折纸设计的应用有助于基于柔性材料的机器人的发展,并在由各种柔性材料如水凝胶、电活性聚合物,液态金属等制成的软体机器人中具有广阔的应用前景。
显然,基于柔性材料的软式机器人在实现各种运动、操作精细物体、提供更安全的人机交互以及适应受限环境等方面展现了出了巨大的可能性,未来也将在更广泛的场景中得到更多的应用。
上一篇:博实股份获中石油近8000万大单
无相关信息