仙知机器人|六种安全措施,为移动机器人高效运行保驾护航
仙知机器人|六种安全措施,为移动机器人高效运行保驾护航仙知机器人|六种安全措施,为移动机器人高效运行保驾护航随着智能制造深入发展,移动机器人在生产车间与仓储物流环节的应用越来越广泛
仙知机器人|六种安全措施,为移动机器人高效运行保驾护航
随着智能制造深入发展,移动机器人在生产车间与仓储物流环节的应用越来越广泛,并开始向医疗、教育、电商、零售等众多领域快速延伸。在各类使用场景下如何保证移动机器人安全运行,一直都是考验移动机器人性能的首要因素。仙知机器人作为移动机器人行业的标杆企业,是如何为移动机器人高效运行保驾护航的呢?
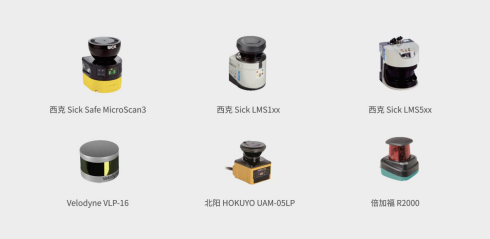
激光雷达
激光雷达,它是激光导航移动机器人的“眼睛”,是移动机器人进行定位导航的核心零部件。其基本原理是通过测算激光发射信号与激光回波信号的往返时间,从而计算出目标的距离。首先,激光雷达发出激光束,激光束碰到障碍物后被反射回来,被激光接收系统进行接收和处理,从而得知激光从发射至被反射回来并接收之间的时间,即激光的飞行时间,根据飞行时间,可以计算出障碍物的距离。根据激光雷达的作用大致可以分为两类,一类是导航激光,一类是避障激光。它们对移动机器人都能进行安全防护。
导航激光
导航激光雷达主要用于移动机器人的定位导航,不同品牌及型号分别有10米、30米、60米等测距范围,并且可以设置停障或减速的距离(如50cm或80cm)。在仙知机器人产品中,SRC核心控制器实时获取导航激光雷达的数据,并通过实时的算法对采集的数据进行计算,如果有物体进入机器人的减速或停止范围内,机器人便会减速或停止。
避障激光

避障激光雷达也是一种IO型传感器,将避障激光雷达的DO接入SRC核心控制器的DI,避障激光雷达检测到有物体进入机器人减速或停止范围内时会输出电平信号,SRC核心控制器接收到信号后立即使移动机器人减速或停止。避障激光雷达可用于覆盖导航激光雷达无法检测到的盲区。
双激光

此外,针对用户现场使用需求,仙知机器人还有双激光解决方案。由于单激光移动机器人在使用过程中,后方的障碍物便无法识别检测,机器人在倒走或后转运动过程中便会存在一定的安全隐患,采用双激光导航,前后对角线各安装一个导航激光,这样可以实现360°无死角全方位检测,保证移动机器人安全运行。
3D相机

在激光导航工业搬运移动机器人中,通常采用的是2D激光,机器人便只能识别检测激光水平面的障碍,无法检测到地面上的坑洞等小型立体障碍物,存在潜在的安全隐患。通过搭载3D相机,移动机器人便能识别地面上的坑洞及小型立体障碍物,并在系统中配置坑洞及障碍物的大小,机器人便能根据配置进行选择停障或绕行,从而保证移动机器人安全运行。
安全触边
安全触边又称防撞条,是一种压敏开关,呈现为柔软的、可弯折的带状物。一般为常开逻辑,当触发的时候,这些安全触边因其柔软性而受压迫变形,其由于传感作用产生一个闭合的IO信号传递给SRC核心控制器,反馈此时AGV或自动叉车碰撞到了物体。
安装安全触边的意义在于由于AGV通常会使用二维激光来感知现场情况,只能对激光平面内的物体进行识别检测,但是用户现场可能存在立体障碍物(如L型)出现在AGV前进的道路上,激光是无法感知物体底部突起部分的,这时候突出来的下半部分就会触碰到防撞条,AGV感知到防撞条触发过后就会立刻停车。所以防撞条一般会安装在激光无法扫描到的的平面上,而且一般会装得比较低,并在机器人前后都会安装防撞条。

对于防撞条仙知机器人有比较丰富的对应逻辑,目前不仅支持最基本的防撞条触发后停车,还支持触发过后进行急停,并具备相应的解除逻辑。
红外光电传感器

移动机器人常用的红外传感器实际上为漫反射光电传感器。漫反射光电开关是一种集发射器和接收器于一体的传感器,发射器会持续性地发射红外光,如果前方没有阻挡物体的时候,红外光会直接发散,接收器不会检测到任何红外光,但当有被检测物体经过时,被检测物体将会将光电开关发射器发射的红外光反射到接收器,于是光电开关就产生了开关信号。

和安全触边不同的是,红外传感器不需要触碰就能触发,拥有一段距离的时间来让AGV进行停车。在仙知机器人产品中,红外光电传感器使用最多的地方是基于SRC的激光SLAM自动叉车,在货叉货叉内部都藏有红外传感器,除确保自动叉车在行走过程中货叉不会碰到障碍物之外,在货叉叉取料架时,也会通过红外传感器确保货叉准确叉取料架及货物。
超声传感器

超声传感器的原理是向某一方向发射超声波,在发射时刻的同时计数器开始计时,超声波在空气中传播,途中碰到障碍物面阻挡就立即反射回来,超声波接收器收到反射回的超声波就立即停止计时。超声波在空气中的传播速度是已知的,根据计时器记录的时间,就可以计算出发射点距障碍物面的距离。
在仙知机器人解决方案中支持两种超声传感器,一种是超声传感器能通过通讯协议来反馈超声目前检测到的障碍物距离,一种是通过IO反馈障碍物是否在指定距离之内。两者比较,后者更为方便。
急停

以上五种方式都是移动机器人自主导航及自主避障的有效途径,并且都是以主动的方式进行的,而“急停”是一种被动的方式。当需要移动机器人由于其它因素需要停止运行时,可以手动拍下急停按钮,机器人便会立即停止运行,也是一种有效的安全措施。
此外,根据用户需求,仙知机器人还可以通过增加警示探照灯、扬声器等进行声光提醒,或是在人流较大的生产车间划定区域限定移动机器人的行驶速度,并对现场工作人员进行安全培训等众多其它方式来为移动机器人安全、高效运行提供保障,促进安全生产。
有关仙知
上海仙知机器人科技有限公司,是一家以移动机器人控制与调度为核心的高新技术企业。作为一站式移动机器人方案专家,仙知机器人掌握了具有自主知识产权的移动机器人核心技术,并在工业自动化领域内拥有丰富的项目经验。仙知机器人致力于服务各行业集成商,并为其提供包括移动机器人控制、调度与信息管理在内的一站式移动机器人解决方案。
目前,仙知机器人的产品、技术及解决方案已在汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务、医疗教育等领域广泛应用。
仙知机器人积极践行企业使命—“让智能创造价值”,不断坚持技术创新,并以开放包容、合作共赢的姿态携手合作伙伴,最大程度地满足客户对产品、技术与解决方案的高品质追求,力争“成为机器人产业的创新者与引领者!”
上一篇:吸尘器哪个牌子好?看完再买吸尘器
-
动动嘴皮即可呼唤 temi机器人即刻为您服务2019-11-20
-
被机器人吐槽,人听了也会落泪2019-11-20
-
人口红利褪去后,送餐机器人正在开启餐饮行业智能化的新纪元2019-11-19
-
仙知机器人与中国移动、爱立信强强联合,共同打造5G智能工厂2019-11-19
-
粒子机器人,能否敲开机器意识觉醒之门?2019-11-09
-
连接WiFi6, 探索5G+,大象机器人闪耀华为HCE欧洲生态大会2019-11-09
-
扫地机器人哪个牌子好?知名品牌热卖产品推荐2019-11-09
-
哇力N1扫地机器人测评,让你动手算我输2019-11-09
-
机器人智能物流解决方案,助力实现智慧生产2019-11-09
-
盘点全球10大最值得关注的机器人2019-11-09
-
陷发展瓶颈?扫地机器人行业分析,SLAM技术成变局关键!2019-11-09
-
为进博会配资,小笨智能“进宝”机器人获媒体青睐2019-11-09
-
2019年经济局势持续不稳,国外机器人巨头加快在华布局2019-11-07
-
仙知机器人|SRC核心控制器,轻松打造你的专属移动机器人2019-11-07
-
扫地机器人哪个牌子好?推荐居家必备好品牌2019-11-07