
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
基于MATLAB&SIMULINK开发自动驾驶系统第三讲之鸟瞰范围内可视化传感器数据和物体跟踪
来源:江南网页版登录入口官网下载
网
时间:2022-02-22 12:02:30
热度:
基于MATLAB&SIMULINK开发自动驾驶系统第三讲之鸟瞰范围内可视化传感器数据和物体跟踪Bird's-Eye Scope可将来自Simulink模型的信号可视化,这些信号代表
Bird's-Eye Scope可将来自Simulink模型的信号可视化,这些信号代表了驾驶场景的各个方面。使用该鸟瞰视图,可以分析:
- 视觉、雷达和激光雷达传感器的传感器覆盖率。
- 传感器探测的周围目标和车道边界。
- 场景中移动物体的跟踪
这个例子展示了如何在仿真过程中在作用域上显示这些信号并分析这些信号。
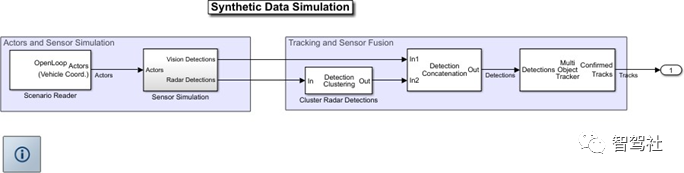
打开模型和鸟瞰视图
打开一个包含传感器探测和跟踪信号的模型。该模型在"在Simulink中使用合成雷达和视觉数据进行传感器融合 "示例中使用。同时将该模型的文件文件夹添加到MATLAB搜索路径中。
addpath(genpath(fullfile(matlabroot,'examples','driving')))
open_system('SyntheticDataSimulinkExample')
从Simulink工具条打开鸟瞰视图。在 Review Results 下,单击 Bird's-Eye Scope。
3.1 查找信号
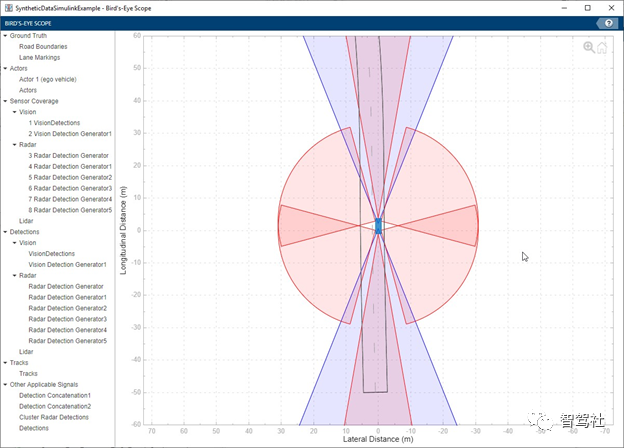
当 第一次打开 Bird's-Eye Scope 时,范围画布是空白的,不显示任何信号。要从打开的模型中找到可以显示的信号,在鸟瞰视图工具条上,单击 "查找信号"。鸟瞰视图会更新框图,自动找到模型中的信号。
左侧窗格列出了鸟瞰视图发现的所有信号。这些信号根据它们在模型中的来源进行分组。
信号组描述信号源地面真值设想中的道路边界和车道标记。 不能修改此组或其任何信号。 要检查大型路网,请使用 "世界坐标视图 "窗口。
? 场景读取模块执行器场景中的执行器,包括被控车辆。 不能修改该组或其任何信号或子组。
? 场景读取模块
? 视觉探测生成器、雷达探测生成器和激光雷达点云生成器块(仅用于执行器资料信息,如执行器的长、宽、高)。
? 如果没有设置actor profile信息或区块之间的信息不一致,则范围将actor profile设置为每个区块的默认actor profile值。
? 被控车辆的配置文件始终设置为每个区块的默认配置文件。传感器覆盖范围视觉、雷达和激光雷达传感器的覆盖区域,按视觉、雷达和激光雷达子组分类。 可以修改该组中的信号。 可以重命名或删除子组,但不能重命名或删除顶层的信号组。传感器覆盖组:还可以添加子组并在子组之间移动信号。如果删除了一个子组,它的信号会移动到顶层的传感器覆盖组。
? 视觉探测发生器模块
? 仿真3D视觉探测生成器
? 雷达探测发生器模块
? 仿真3D概率雷达块
? 激光雷达点云发生器块
? 仿真三维激光雷达块探测信号从视觉、雷达和激光雷达传感器获得的探测结果,按视觉、雷达和激光雷达子组分类。 可以修改该组中的信号。 可以重命名或删除子组,但不能重命名或删除顶层的信号组。探测组:还可以添加子组并在子组之间移动信号。如果删除了一个子组,它的信号会移动到顶层的探测组。
? 视觉探测发生器模块
? 仿真3D视觉探测生成器
? 雷达探测发生器模块
? 激光雷达点云发生器块
? 仿真3D概率雷达块
? 仿真三维激光雷达块融合信号场景中物体的跟踪信号 可以修改该组中的信号。 可以重命名或删除子组,但不能重命名或删除顶层的信号组。跟踪融合组:也可以向该组添加子组,并将信号移入其中。如果删除一个子组,它的信号就会移动到顶层的跟踪组。
? 多对象跟踪器块其它信号范围内不能自动分组的信号,如结合多个传感器信息的信号。 可以修改本组中的信号,但不能增加子组。 本组中的信号在仿真过程中不显示。
?将信号组合或集群的块(如探测连接块)。
? 包含探测和跟踪的位置和速度信息的非虚拟Simulink总线。
?车辆到世界和世界到车辆区块
? 任何创建包含执行器姿态的总线的区块
? 关于创建这些总线时所需的执行器姿势信息的详细信息。
在仿真之前,但在点击查找信号之后,鸟瞰视图画布会显示除非被控执行器和所有传感器覆盖信号之外的所有地面真值信号。在仿真之前,目标执行器以及探测和跟踪下的信号不会显示。其他适用信号中的信号在仿真期间不显示。如果想让鸟瞰视图显示特定的信号,请在仿真前将它们移到适当的组中。如果不存在适当的组,请创建一个组。
3.2 运行仿真
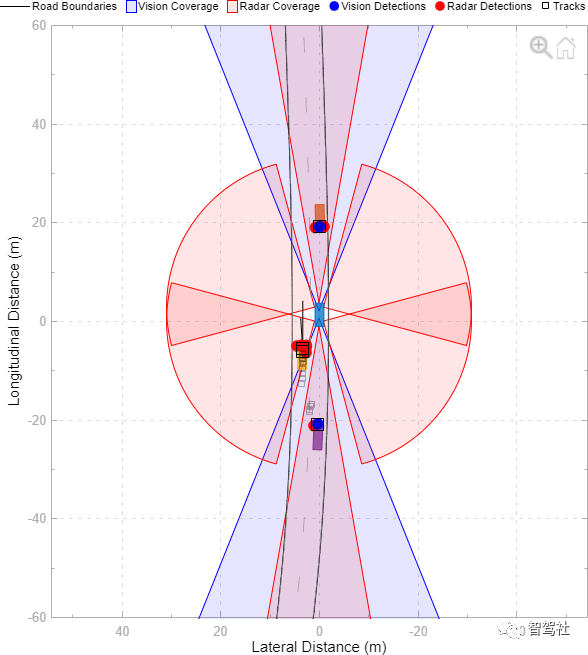
单击 "运行",从 "鸟瞰视图 "内仿真模型。鸟瞰视图画布显示探测和跟踪。要显示图例,请在范围工具条上单击 "图例"。
在仿真过程中,可以执行这些操作。
- 检查探测、跟踪、传感器覆盖区域和被控车辆行为。默认视图以车辆坐标显示仿真,并以被控车辆为中心。要查看被控车辆周围更广的区域,或者要查看场景的其他部分,在鸟瞰视图工具条上,单击世界坐标。世界坐标视图窗口显示整个场景,被控车辆被圈起来。这个圆圈不是传感器覆盖区域。要返回到默认的的任何一个窗口的显示,将指针移到窗口上,在右上角,单击出现的主页按钮。
- 更新信号属性。要访问信号的属性,首先从左侧窗格中选择信号。然后,在鸟瞰视图工具条上,单击 "属性"。例如,使用这些属性,可以显示或隐藏传感器覆盖区域或探测。此外,要突出显示某些传感器覆盖区域, 可以更改其颜色或透明度。
- 更新 Bird's-Eye Scope(鸟瞰视图)设置,例如更改 "车辆坐标视图 "窗口的轴限制或更改信号名称的显示。在范围工具条上,单击 "设置"。在仿真过程中,不能更改 "跟踪位置选择器 "和 "跟踪速度选择器 "设置。
仿真结束后, 可以为下一次仿真隐藏某些探测或跟踪。在左侧窗格中,在 "探测 "或 "跟踪 "下,右键单击要隐藏的信号。然后,选择 "移动到其他适用 "将该信号移动到 "其他适用信号 "组。要隐藏传感器覆盖区域,请在左窗格中选择相应的信号,并在 "属性 "选项卡上清除 "显示传感器覆盖 "参数。仿真过程中不能隐藏地面真值信号。
3.3 组织信号组(可选)
要进一步组织信号,可以重新命名信号组或将信号移动到新的组。例如, 可以将 "视觉 "和 "雷达 "子组重命名为 "车头 "和 "车尾"。然后可以根据需要拖动信号,将它们移动到基于新的信号组的适当组中。组名称。当 将信号拖动到新组时,信号的颜色会改变,以匹配分配给其组的颜色。
不能重命名或删除左窗格中的顶层组,但 可以重命名或删除任何子组。如果删除一个子组,它的信号就会移动到顶层组。
3.4 更新模型和重新运行仿真
运行仿真后,修改模型并检查更改如何影响鸟瞰视图上的可视化。例如,在模型的传感器仿真子系统中,打开两个视觉探测生成器块。这些块的传感器指数分别为1和2。在每个块的 "测量 "选项卡上,将 "最大探测范围(m) "参数减少到50。要查看传感器覆盖范围如何变化,请重新运行仿真。
当修改块参数时, 可以重新运行仿真,而不必再次查找信号。如果添加或删除块、端口或信号线,那么必须在重新运行仿真之前再次单击查找信号。
3.5 保存和关闭模型
保存并关闭模型。Bird's-Eye Scope 的设置也会被保存。
如果重新打开模型和 Bird's-Eye Scope,范围画布最初是空白的。
单击 "查找信号 "可再次查找信号并查看保存的信号属性。例如,如果在上一步中缩小了探测范围,范围画布将显示此缩小的范围。
当完成仿真模型后,从MATLAB搜索路径中删除模型文件文件夹。
rmpath(genpath(fullfile(matlabroot,'examples','driving')))
原文标题:基于MATLAB&SIMUlink开发自动驾驶系统第三讲之鸟瞰范围内可视化传感器数据和物体跟踪


-
基于MATLAB&SIMULINK开发自动驾驶系统第一讲之传感器配置和坐标系转换2022-02-22
-
这六个强烈的市场信号,给2021年江南网页版登录入口官网下载 行业画下句点2022-01-25
-
燃料电池车厂商可以采用哪些氢气传感器监测氢气泄漏?2022-01-25
-
2022中国商用车产业大会传递信号:到2035年,50%以上商用车将实现新能源化2022-01-20
-
霍尔传感器和电流纹波技术在电动车窗防夹中的应用2021-12-24
-
氧化锆传感器测量汽车排放物中所含氧气浓度的应用解决方案2021-12-24
-
液位传感器可用于汽车油箱液位检测2021-11-30
-
如何使用数字信号控制器构建更好的汽车和电动汽车系统2021-11-24
-
一种车辆区域识别超声波避障传感器2021-09-08
-
中国汽车传感器行业细分市场竞争格局分析 国外企业处于领先地位2021-08-31
-
江南网页版登录入口官网下载 电池热失控着火检测预警用什么传感器?2021-08-19
-
小鹏汽车加速驶入港交所,释放超车信号!2021-07-29
-
恩智浦雷达信号处理器为NCAP提供可扩展解决方案2021-07-20
-
为什么氢燃料电池汽车上要安装氢气传感器?2021-07-19
-
汽车政策:促消费利好信号持续释放,江南网页版登录入口官网下载 依然是重点2021-07-07