
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
芯与核今非昔比,智能汽车的发力点在哪儿?
来源:江南网页版登录入口官网下载
网
时间:2021-11-18 19:09:32
热度:
芯与核今非昔比,智能汽车的发力点在哪儿?文︱立厷图︱网络智能网联汽车(ICV)催生了整个汽车产业的巨大变革,而当前行业首当其冲的是缺芯少核,不仅是作为硬件的芯片,还有作为汽车灵魂的
文︱立厷
图︱网络
智能网联汽车(ICV)催生了整个汽车产业的巨大变革,而当前行业首当其冲的是缺芯少核,不仅是作为硬件的芯片,还有作为汽车灵魂的软件,特别是操作系统。中国汽车产业如何在这样的大背景下寻求发展,来看看国汽智控(北京)科技有限公司总经理、首席技术官尚进博士在以“智车智驾 智创未来”为主题的2021中关村智能网联汽车国际创新论坛上怎么解读。他也是国家智能网联汽车创新中心首席技术专家、中国智能网联汽车产业创新联盟基础软件工作组组长、清华大学车辆与运载学院客座研究员。
芯与核今非昔比,发力点在哪儿?
尚进博士表示,我们的汽车电子发展了几十年,本来就有芯和核,但在智能网联时代,芯是加入了AI(人工智能)形成的比较大的SoC(系统级芯片);核在软件定义汽车时代有了全新的定义,绝不是计算机的传统内核,更不是汽车中原来有的一些东西。所以,需要搞清操作系统是什么?核是什么?在智能汽车中有什么样的作用?
倒退二三十年,从Windows-Intel的互联网到今天的智能汽车时代,未来五到十年,产业联盟或核是什么?既有封闭体系,从传统的微软、苹果到今天汽车行业的特斯拉;也有开放体系,如Linux、Google和Android。
今天大家都在讲软件定义、数据驱动,但我们对特斯拉的了解有点像盲人摸象。倒退3到4年,人们认为特斯拉的新能源三电做的不错,后来又觉得特斯拉的AutoPilot智驾不错,近一年多在说特斯拉EE架构最好;近大半年,发现特斯拉的真正武器是软件定义汽车。
很明显,汽车行业需要新的产业链出现,如Tier 1.5的新模式。半年来汽车数据安全、信息安全也成为了热点。随着智能网联汽车发展,数据越来越多,车辆越来越智能,软件也越来越多。对中国而言,智能网联汽车的本地化属性和中国方案标准越来越受到关注。中国标准并不是封闭的,需要基于中国传统汽车的发展,结合ICT与基础设施建设,以此推动智能网联汽车的新功能、新架构在国内的应用,反过来带动创新,并进一步推向世界。
智能网联汽车可以理解为四个轮子上的一个数据中心。数据中心当然有硬件及其操作系统或基础软件。几年前,博世就提出了整个车辆EE架构的变化,现在行业都认识到集中域控的重要性。博世说下一步是车内域控和云计算的结合,但直到今天整个行业都没有回答这个终极架构问题。现在,国内外的主机厂不仅做硬件,也都有自己的软件公司。
事实上,我们所熟知的芯片硬件企业其核心或发力点是基础软件,比如特斯拉最强大的武器是软件定义OTA(空中下载技术)。其核心是操作系统应用的开发新模式,它更新的是应用,而不是整个软件栈。否则,从定义一个功能到实现、测试、部署,就不可能在短时间内完成。
所以,行业一定要有一个好操作系统和架构。博世不仅提硬件架构,也提软件架构。它创造性地分了三层架构,下面是ICT基础架构、内核和车辆的AUTOSAR中间件;中间是针对应用的可插入模块;上面是应用开发层。左边是同样的架构在云上的映射,然后是数字孪生。
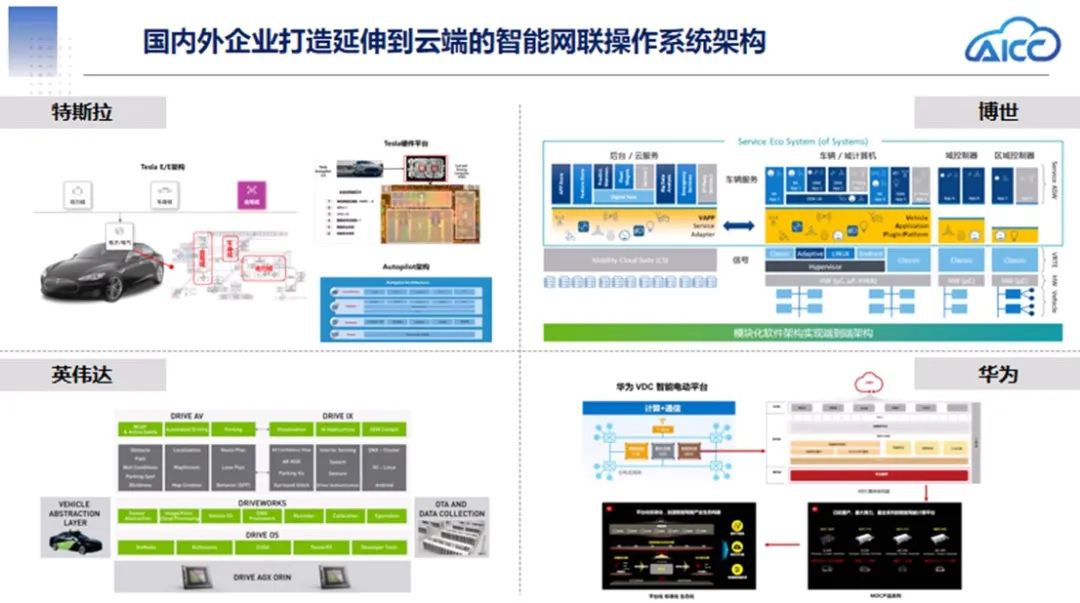
从整个行业发展看,不论是代表硅谷ICT进入汽车行业的特斯拉,还是传统汽车巨头,都认为变革不仅仅是芯片硬件,更主要的是定义软件或汽车操作系统。传统内核只是一部分,更重要的是连接计算机内核和应用平台之间的部分。
什么是自动驾驶操作系统?
尚进博士说,两年前提出的中国自动驾驶操作系统现在看起来还是极具前瞻性的顶层设计,回答了智能汽车操作系统不仅仅是内核,而是包含行业共性东西的问题,如驾驶功能或应用开发需要的基础软件。
在开发车辆应用时,主机厂怎么开发自动驾驶功能呢?应该像基于AUTOSAR开发网关那样进行开发,使用集中域控开发自动驾驶操作系统。自动驾驶的研发包括底盘域、座舱域等,然后还要把动力域集成在一起,这就要使用智能汽车操作系统。它是对中央域控、与云结合的很多ICT的一个抽象共性解析,一定离不开车辆功能的共性。
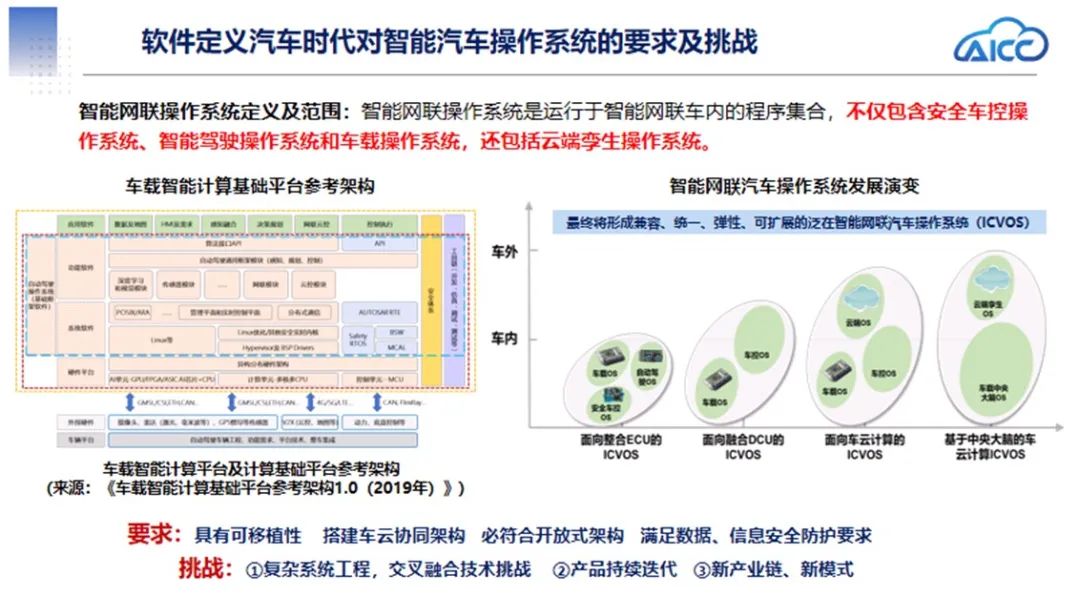
中国正在定义车辆操作系统的国标,包括车控和车载。车控分成两个阶段,第一个现在已经有了,叫做安全车控,包括传统的AUTOSAR CP;而在自动驾驶场景,需要基于域控的行业融合支撑的公共软件,进一步开发整车操作系统及云操作系统。
智能网联汽车OS开发实践
今年3月,工信部发布了《车载智能计算基础平台参考架构1.0》(简称“车载计算基础平台白皮书”),作为其编撰者之一,尚进博士表示,不论是汽车操作系统,还是手机操作系统,操作系统首先要向下跟硬件解耦,一是跟芯片解耦,二是跟硬件架构解耦。
自动驾驶域控基于的硬件架构有几种。一种是Mobileye,用智能传感器来做;另一种是一个大的SoC;还有一种是AI和计算分离的硬件。不同的硬件架构应该使用同一套操作系统,要能够跟架构或芯片解耦。
从自主角度看,这样的操作系统不仅支持华为,也支持地平线、黑芝麻,以及一些国外厂商。另一点是优化,做车用产品,特别是车控自驾,包括底盘、车身等,必须具有实时性和安全性,又离不开深度耦合。

在内部实现方面,传统计算机内核、AUTOSAR或传统车辆操作系统,还有功能软件起什么作用呢?主要是衔接ICT和应用开发,具体包括保证整个域控器的实时性、可靠性和平台化,还有数据安全。
操作系统包括数据安全、网联云控功能,不仅有传统计算机定义的CPU调度、内存分配,还包含网络栈,甚至包含防火墙功能。所以,任何一个定义的操作系统不仅包含行业本身的应用开发,也包含很多应用中需要的共性东西。这个操作系统向上要提供应用开发接口,能够让主机厂、Tier 1高效地开发自动驾驶应用。
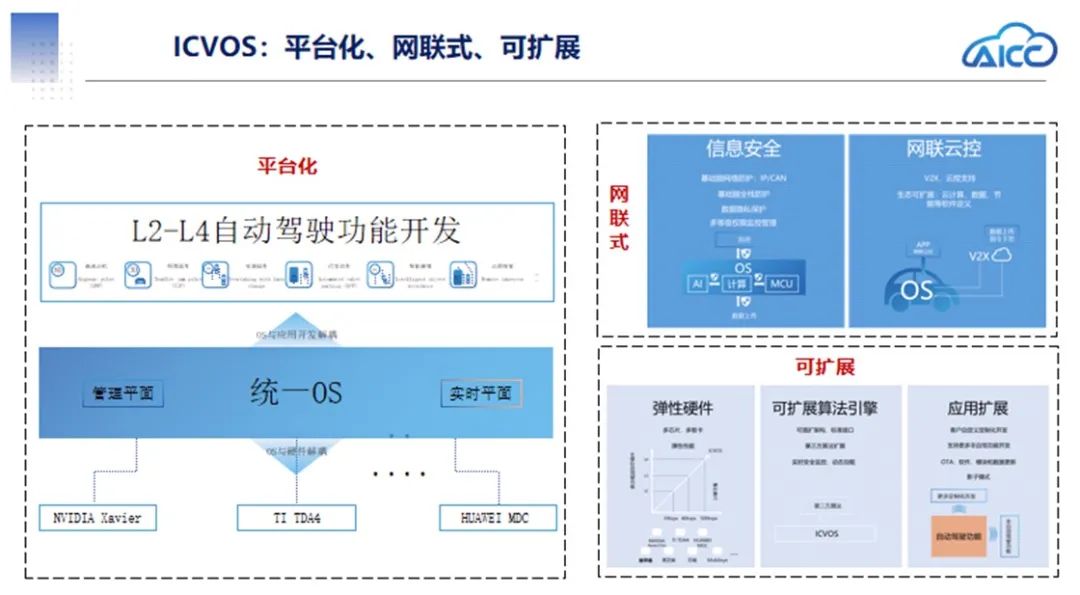
在软件定义汽车时代,需要开发更多的扩展功能,比如各种HMI(人机接口)、面向SOA(面向服务的架构)的各种接口。一个好的操作系统平台要向下跟硬件解耦,同时具有控制性。随着芯片功能的提升,操作系统性能也要提升。支持L1、L2、L4功能的应该是同一套操作系统,也包括算法。主机厂需要找到自己的发力点,有自己的开发习惯,而操作系统也要跟主机厂共建,能够将一些主机厂定制化的算法无缝插入,最后形成主机厂的定制OS。
主机厂有所为,有所不为
尚进博士认为,产业链不同部分的厂商应该有所为,有所不为。汽车最终一定是硬件和软件集成在一起的产品,离不开整体系统架构。智能汽车操作系统要求分布式架构设计,包括硬件和软件的协同,所以包含一些硬件和软件设计平台。操作系统是顶层设计,我国也在同步推进和建设汽车国家标准团标。
今年7月,汽车操作系统架构已准备国标立项,团标也在推进中,应该在下个月正式发布,整个行业有四、五十家企业参与。
未来的操作系统将向下跟硬件解耦,向上支持全生态链的所有主机厂。目前这样的操作系统向上提供七类接口,总共有60多个API(应用程序接口),有多达150多项数据类型和消息。这些不是传统车的信号,而是基于集中域控为自动驾驶开发和新增的内容,不久将推动团标做进一步的补充,希望有全行业的积极参与。

应用开发到底怎么做?
关于应用开发,尚进博士以自动驾驶中人们最熟悉的多源融合ACC功能为例解释说,基于单雷达的ACC可以通过增加摄像头等多源传感器来增加车道线识别功能,实现横向控制能力的快速开发。
其五个步骤包括:通过默认状态机加载一个ACC应用,以单毫米波达为感知源;通过车辆系统适配SKD新传感器;用状态机配置SKD功能状态和参数;用插扩算法SDK配置新的融合算法;通过规划控制SDK选择合适的规控算法和组件。在这个过程中,环境型数据不需要通过环境模型SDK重构,传感和算法适配好后数据自动按新配置输出,即可获取使用。
整个开发过程是一个完整的SDK环境,从开发编译到仿真测试都集中在一起。现在主机厂跟以前不一样,一定要下沉,这也是为什么利用所提供的操作系统,由主机厂做应用开发的原因。主机厂可以自定义ACC状态机,针对别规控算法,主机厂可以使用一个无缝API接口来保证整个系统的实时性、可靠和功能安全。
比较热门的NGP(自动导航辅助驾驶)功能也是这样,主机厂可以利用七类不同SDK定义自己的NGP属性,根据需要自定义算法。算法、状态机或控制逻辑都可以自动加入。操作系统与硬件集成在一起提供了几大数字底座功能,保证整个系统的实时性、可靠性和不同硬件平台的优化。

另一个很有意思的是HMI,软件定义并不只是自动驾驶,还有更多扩展功能,自动驾驶操作系统可以由主机厂来定义和定制,HMI可以是座舱,也可以是云端,由第三方以SOA的形式提供不同的消息和数据,并通过接口来定义开发。
数据安全和信息安全不可或缺
尚进博士指出,数据安全和信息安全是智能汽车的必需,也是操作系统的一个重要组成部分。车辆需要车规级的实时性和可靠性,所以一定要跟自动驾驶数据和核心操作系统耦合在一起。
行业所面临的一个创新性挑战是自动驾驶安全和车辆数据安全,因为车辆数据量巨大,而且车辆智能化的处理能力都不是传统信息安全溯源所能够处理的。
传统信息安全架构包括防火墙和认证,仍然会存在,它是行业发展的引路或借鉴。但是我们所面临的新挑战是自动驾驶安全和数据安全。
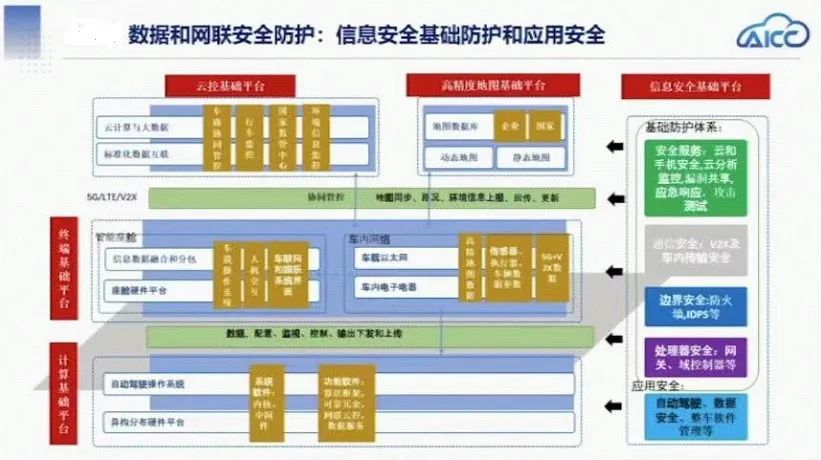
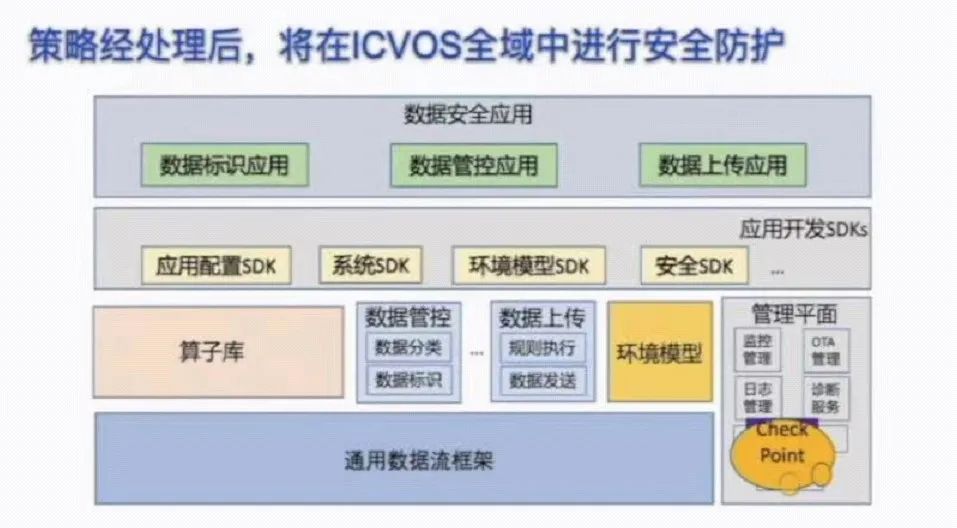
在自动驾驶的感知规划决策、感知规划控制之间需要做一定程度的隔离,以保证数据安全。从摄像头收到数据、处理、存储,最后传输的整个过程中,需要做更好的数据分类和分级,实现监控和保护。很明显,这与自动驾驶操作系统是强耦合的。同样,用操作系统也可以做自动驾驶、数据安全核心应用的开发。
这里的主要工作是配置,可以提供给主机厂,也可以提供给终端用户,更可以实现国家监管。利用SDK接口可以为ACC配置不同的策略来实现数据防护,通过自动驾驶架构SDK配置数据安全。

针对ICVOS,根据国家相关法律、法规开发的电子围栏功能包括:数据分类、数据分级、策略执行和数据脱敏。在缺省情况下,可以将四类分级数据都上传到云端。此外,如果车开到敏感区域,比如市政府,只有低等级的一级、二级数据可以上传,三级、四级数据不能上传;如果开到军事区,不仅是上传数据,对周边摄像头也会进行限制,如打上马赛克,只能识别做巡航的车道线。再往前开,不仅不能上传数据,不能巡航,车也要停下来。数据安全分类大局已定,但是真正要做数据安全防护,一定要跟自动驾驶强耦合。
在车云计算协同中,我们可以将一个物理单车数字化,或者叫智能网联化的数字抽象,用硬件加上操作系统完成所有应用的开发。今天的车就像一个四个轮子上的数据中心,但现实情况是,ICT必须是云计算,必须融合在一起,有实时的安全架构。
从车控角度看,传统的几大域:行驶智驾域、动力车身域、底盘域,都需要实现计算自然延伸到边缘,即5G MEC,只有利用操作系统才能扩充应用,将物理单车计算与边缘融合在一起,实现真正的延伸。
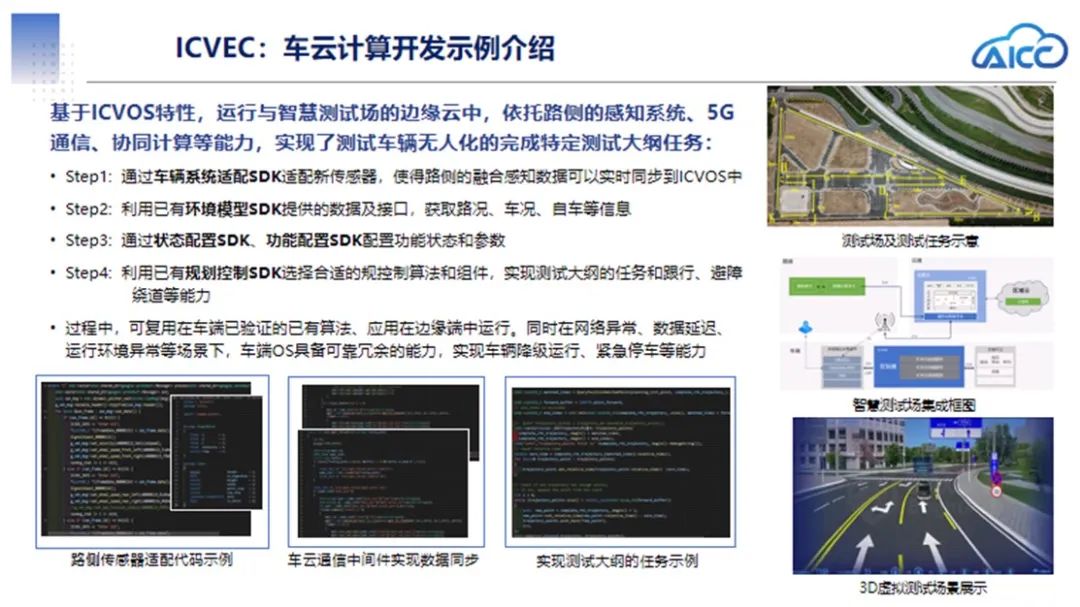
在实践中,通过与各主机厂的合作,在试验场实现了车边计算架构,融合了车、路、云、网、图。基于一个逻辑上统一的OS,从单车到云端,通过不同配置实现车云协同,车和边缘都运行OS,实现了计算、协同感知、决策规划。
生态链协作刚刚开始
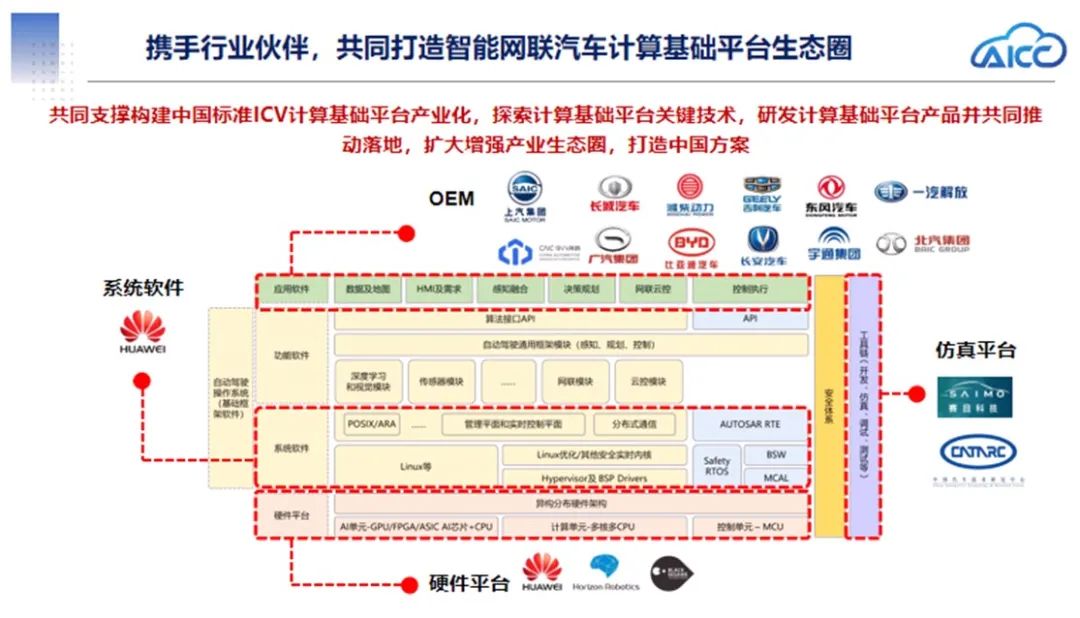
在推动顶层设计和行业工程产品过程中,整个体系架构不是一家所有,需要团结整个生态链推进、支撑实现中国标准,帮助中国主机厂实现腾飞。操作系统向下支撑几乎所有的中国自主技术,也包括国外的芯片硬件平台;向上服务全部主机厂,分两层融入成熟的产业链和算法;另一方面,主机厂也会开发很多模块,最后在定制操作系统上做应用开发。
展望未来,智能网联汽车正在走向硬件趋同、软件定义和数据驱动。未来将是弹性异构分布硬件平台+可移植开放架构、车云协同的操作系统+广泛应用开发,还必须有信息安全和数据安全。
尚进博士最后表示,我们的事业刚刚开始,智能网联是汽车行业变革的下半场。今后将继续基于行业平台持续进行前瞻研究、标准研制、测评、示范,共同推进整个行业的发展。
上一篇:禾赛科技折戟“激光雷达第一股”


-
河北燃气汽车加气设施建设提速2023-11-30
-
我国发展天然气汽车的有利条件2023-11-30
-
今年将引进换购纯电动汽车1230台2023-11-30
-
核能汽车一辈子只充一次电现实吗2023-11-30
-
公安部:12城启用江南网页版登录入口官网下载 专用号牌2023-11-30
-
规范汽车投资行为 推动江南网页版登录入口官网下载 健康发展2023-11-30
-
2018年纯电动汽车强势来袭 你准备好了么2023-11-30
-
汽车协会和电池联盟联合发布第一批《汽车动力蓄电池和氢燃料电池行业白名单》2023-11-30
-
河南省出台江南网页版登录入口官网下载 地补政策 补贴不超中央50%2023-11-30
-
河南江南网页版登录入口官网下载 补贴变局 新版补贴方案鼓励里程更长、能耗更低车型2023-11-30
-
江南网页版登录入口官网下载 动力终极方案走向燃料电池 上海坤艾新成果或推动行业飞跃发展2023-11-30
-
江南网页版登录入口官网下载 频繁起火警示:安全才是重中之重2023-11-30
-
习近平向2019世界江南网页版登录入口官网下载 大会致贺信2023-11-30
-
2018年度中国乘用车企业平均燃料消耗量与江南网页版登录入口官网下载 积分情况公布2023-11-30
-
平安银行 电动车起火事件频发 工信部:正牵头编写江南网页版登录入口官网下载 安全指南2023-11-30