
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
智能网联汽车决策技术未来发展
来源:江南网页版登录入口官网下载
网
时间:2021-08-26 14:02:59
热度:
智能网联汽车决策技术未来发展随着智能汽车相关技术不断取得突破性进展,智能化逐渐成为汽车技术重要发展方向和标志。车辆环境感知技术是智能车辆的关键性技术之一,通过传统车辆感知技术并结合
随着智能汽车相关技术不断取得突破性进展,智能化逐渐成为汽车技术重要发展方向和标志。车辆环境感知技术是智能车辆的关键性技术之一,通过传统车辆感知技术并结合车联网分析了车辆网下的车辆环境感知技术及未来发展趋势。车辆的环境感知技术是汽车向智能化发展的关键技术之一,也是智能汽车的基础。
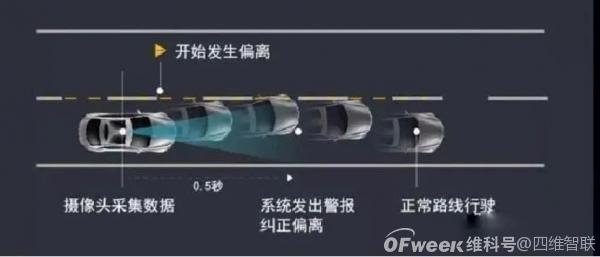
尤其是近几年随着无人驾驶技术普及认知和主动安全技术,更是依赖于车辆对周围环境的探测和感知。车辆感知技术对于减少交通事故有很大的帮助,还可以通过提高道路上行驶车辆的平均车速和缩短车距来提升运输效率和道路单位时间内的车辆容量。同时也可以使车辆更加平稳的运行,大大降低急刹车概率,节约油耗降低排放。
智能决策的定义:智能网联汽车是集感知、决策和控制等功能于一体的自主交通工具。其中,智能决策是依据感知信息来进行决策判断,制订相对控制策略,替代人类驾驶员做出驾驶决策。

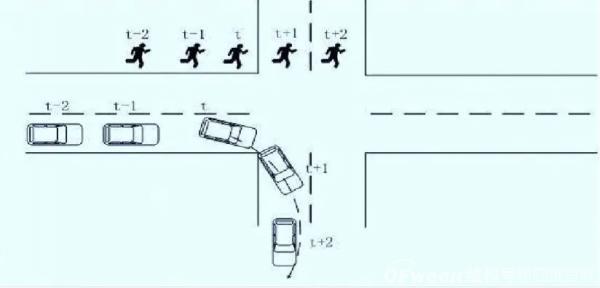
(1)环境预测模块:作为决策规划控制模块的直接数据上游之一,其主要作用是对感知层所识别到的物体进行行为预测,并且将预测的结果转化为时间空间的轨迹传递后给后续模块。通常感知层所输出的物体信息包括位置、速度、方向等物理属性。
(2)行为决策模块:在整个自动驾驶决策规划控制软件系统中扮演着“副驾驶”角色。这个层面汇集了所有重要的车辆周边信息,不仅包括了自动驾驶汽车本身的实时信息、速度、方向,还包括车辆周边一定距离以内所有的相关障碍物信息以及预测的轨迹。行为决策层需要解决的问题,就是在知晓这些信息基础上,决定自动驾驶汽车的行驶策略。
(3)动作规划模块:包括运动规划和路径规划两部分。动作规划模块主要是对短期感知瞬间时动作进行规划,例如转弯、避障、超车等动作;而路径规划模块是对较长时间内车辆行驶路径规划,例如从出发地到目的地之间的路线设计或选择。
(4)路径规划模块:主要包含两个步骤:建立包含障碍区域与自由区域的环境地图,以及在环境地图中选择合适的路径搜索算法,快速实施地搜索可行驶路径。路径规划结果对车辆行驶起着导航作用,它引导车辆从当前位置行驶到达目标位置。环境地图表示方法主要分为度量地图表示法等。

综上,智能网联汽车通过现代通信技术实现与其他车辆、道路和行人等之间进行数据交互,结合汽车自身环境感知系统,对行驶环境进行识别,并加以智能决策和协同控制,实现汽车自动驾驶与网联服务,提高汽车安全性、舒适性和高效性。
四维智联始终在智能汽车与人工智能领域深耕发力,立足技术原点,以包括操作系统、智能座舱、后装硬件及运营服务等在内的多项核心技术为支持,不断研发并优化智能化车载信息服务系统及后期配套服务;同时,基于“软件定义汽车”的理念,在座舱域、智能驾驶域,面向车厂合作伙伴提供软件个性化定制应用开发及运营。四维智联将持续深入汽车智能生态中技术力量得以融合打通,进一步推动汽车行业智能化发展。


-
我国发展天然气汽车的有利条件2023-11-30
-
银隆掌握兆瓦级电池储能技术2023-11-30
-
今年将引进换购纯电动汽车1230台2023-11-30
-
核能汽车一辈子只充一次电现实吗2023-11-30
-
公安部:12城启用江南网页版登录入口官网下载 专用号牌2023-11-30
-
规范汽车投资行为 推动江南网页版登录入口官网下载 健康发展2023-11-30
-
2018年纯电动汽车强势来袭 你准备好了么2023-11-30
-
汽车协会和电池联盟联合发布第一批《汽车动力蓄电池和氢燃料电池行业白名单》2023-11-30
-
河南省出台江南网页版登录入口官网下载 地补政策 补贴不超中央50%2023-11-30
-
河南江南网页版登录入口官网下载 补贴变局 新版补贴方案鼓励里程更长、能耗更低车型2023-11-30
-
江南网页版登录入口官网下载 动力终极方案走向燃料电池 上海坤艾新成果或推动行业飞跃发展2023-11-30
-
江南网页版登录入口官网下载 频繁起火警示:安全才是重中之重2023-11-30
-
习近平向2019世界江南网页版登录入口官网下载 大会致贺信2023-11-30
-
2018年度中国乘用车企业平均燃料消耗量与江南网页版登录入口官网下载 积分情况公布2023-11-30
-
平安银行 电动车起火事件频发 工信部:正牵头编写江南网页版登录入口官网下载 安全指南2023-11-30