
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
激光雷达的技术战:测距能力并非关键制胜点
来源:江南网页版登录入口官网下载
网
时间:2021-08-23 10:04:42
热度:
激光雷达的技术战:测距能力并非关键制胜点全球汽车快讯 据外媒报道,激光雷达之战持续升温。这不足为奇,毕竟在过去半年内,有6家公司公开上市并通过特殊目的收购公司(Special Pu
全球汽车快讯 据外媒报道,激光雷达之战持续升温。这不足为奇,毕竟在过去半年内,有6家公司公开上市并通过特殊目的收购公司(Special PurposeAcquisition Companies,SPAC)并购案成为了激光雷达领域内的“独角兽企业”。
从本质上讲,是数十亿美元的市值(估值)、上报季度亏损的压力以及推升股价的必要性共同引发了一场在探测范围技术领域开展的激光雷达大战。具体来说,就是激光雷达能够“看”多远、能够识别多远距离外的车辆、行人、动物、障碍区及道路碎屑等物。
出于眼部安全的考量,波长在8XX-9XX纳米的激光雷达应用受限,相较于波长在14XX-15XX纳米的激光雷达,前者的探测范围更近些。
而后者所使用激光器的功率更高,因为人类的眼角膜能吸收该波长的光,从而限制了对视网膜的损伤。至于更高的波长,其耗费非常昂贵(相较于8XX-9XX纳米的激光雷达系统,其成本是前者的2-3倍)。
经营处于该波长段激光雷达业务的公司,则需要证明其高昂成本的合理性,此时,探测范围性能似乎成为了一个重要论据。
美国普林斯顿光波(PrincetonLightwave)和Luminar公司率先宣布其15XX纳米车载激光雷达的探测范围在200-300米并进行了技术演示。
Aeva于近期宣布,其15XX纳米调频连续波(Frequency Modulated ContinuousWave,FMCW)激光雷达对车辆和行人的最大探查距离分别为500米和350米。

在此之前,Aeye宣称其激光雷达对车辆的最大探查距离为1公里。Argo也不甘示弱,该公司最近宣称其盖格模式(Geiger Mode)激光雷达的工作波长> 1400纳米,相应的最大探测范围达到了400米(Argo于2017年并购了美国普林斯顿光波公司)。
Argo宣称旗下的激光雷达产品能够夜间探查到反射率为1%的车辆。(但是Argo声明中提到的夜晚,有点令人困惑。因为对盖格模式而言,更具挑战性的应用情境是在明媚的阳光下。)
目前尚不清楚,在明媚的阳光下,其产品能否探查到反射率为1%的目标物。如果能做到的话,那绝对是突破性技术!当然,不谈目标物探查,在这类环境下,对目标物的识别能力也不得而知。
对4级自动驾驶车辆而言,激光雷达的探测范围具有重要意义,但产品规格的需求方面则存在细微差异。对于关键安全性避障,自动驾驶车辆的感知引擎须在恰当的时机识别道路上的险情,从而启用安全性操作,如:启用制动来规避轮胎碎片。
重要的是特定目标物反射率的范围(10%似乎是一个合理的标准),对危险识别的高置信水平也很高(> 99%),(否则,误报率将非常高,导致不断刹车,造成乘客产生不适并引发投诉)。
值得注意的是,探查与识别之间是存在差异的。探查指的是,那里有东西,但我们不知道那是啥。而识别指的是,那里有东西,要么是抛锚的车辆,要么就是行人。
人们所给出的探查数值,通常是不可执行的,这类事件太频繁了。识别是个更难的问题,其仰仗于分辨率(见下图)和实时图像处理的精准度。
自动驾驶车辆采用其传感器、感知引擎及人工智能来采取5种基本的控制动作:制动、转向、加速、减速或停车。截止至目前,最关键的、对时间/安全最敏感的动作是:在出现障碍时刹车。
制动距离(将车速降至零所需的距离)是初始车速和安全/舒适减速(通常是0.3g或3 m/s2)的一个函数。所需的感知范围是车速与延迟的一个函数。
延迟是获取原始传感器数据和应用安全操作(在本例中为刹车)间的时间间隔,且延迟会对所需的感知范围产生影响,因为在此期间,车辆仍在继续移动。
图1表明了这三个量之间的关系
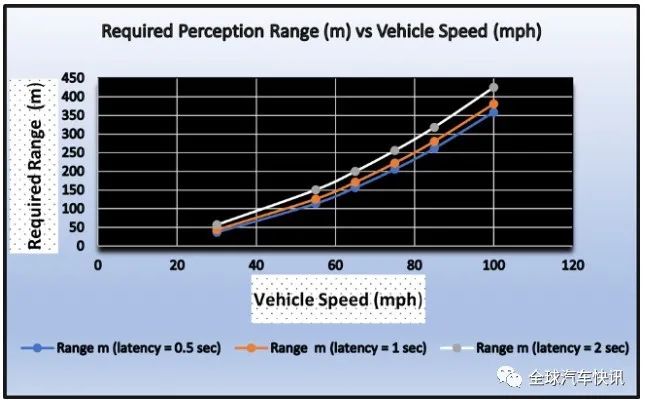
多大的感知范围才足够呢?承诺更高的感知范围,有什么意义吗?在不远的将来,4级自动驾驶车辆以高于60-70英里/小时的车速在高速公路上行驶,这是不太可能的事情。(那么,5-10年后呢?)
在上述车速下,似乎200-250米的感知范围就足够了。重型卡车需要在制动时更低的减速水平、更高的感知范围。然而,若低速行驶(55-60英里/小时),200-250米的感知范围就很合适。
气候是需要达到另一项因素——在恶劣天气下,减速水平会下滑,但车速也会减低,200-250米的感知范围是个合理的操作指标。
获取更高水平的目标物识别范围将花费高昂代价,因为需要消耗更多的激光雷达资源(激光器功率、更敏感的探测、更高的耗电量等。)
目前很多争论是提高限制的,如:新增安全边际量和特定的用例(举个例子,糟糕的路面、恶劣的天气等。)然而,提升该性能指标的缺点在于:在对象分辨率等其他参数方面做妥协,如图2所示。
图2:随着感知范围的提升,对象分辨率将下滑

对象分辨率决定了识别的置信水平,该参数对自动驾驶车辆的感知和控制动作起到了关键性作用。探查和分辨轮胎碎屑或砖块(通常为6英寸或15厘米大小)通常需要8厘米级的分辨率(对于识别而言,至少需要2个像素,3个像素是理想值。)
将范围从200米翻两倍提升至400米,则需要将角分辨率从0.5 mrad提升至0.25 mrad,这意味着原始数据及运算带宽的量也要翻两倍,这就造成光学件的成本及运算成本增高。
这还延长了延迟时间,需要提升感知距离或降低车速(见图1)。希望图3能更清楚地阐述这种循环性。
图3:范围-分辨率-速率的难解之谜:
1)高车速和高延迟需要更大的感知距离,2)……
承诺越来越高的探测范围并非是打造卓越激光雷达产品的良方。需要考虑的是用例和有内在联系的系统规格,如:分辨率、帧速和延迟。
必须要澄清实现更远探测范围的确切条件及定义(反射率、置信水平、延迟、照明条件、角分辨率等),并且明确说明该探测范围内所实现的感知功能(探测、识别和鉴别)。
随着激光雷达成为关键的安全传感器,在普遍接受的标准和规格方面,还需要成熟起来。(本文为编译作品,所用英文原文和图片选自fountech-ventures.medium)


-
特斯拉:我坚定拥护摄像头,不用激光雷达,不信你们看我的技术2021-08-22
-
MIT研发深度神经元网络 旨在解决自动驾驶车辆的网络安全问题2021-08-20
-
中国车企想要赢过特斯拉,激光雷达是关键!2021-08-19
-
OPPO公开车辆灯光控制专利2021-08-18
-
警方通报蔚来自动驾驶事件:追尾前方施工车辆致亡,已派专员开展调查2021-08-18
-
官方通报“蔚来自动辅助驾驶车祸事件”:撞击前方施工作业车辆致亡2021-08-18
-
美国正式调查特斯拉Autopilot 涉及76.5万辆车辆2021-08-18
-
林文钦亲属发声:将开始对事故车辆鉴定2021-08-17
-
美国启动对特斯拉自动驾驶的调查:难以识别停放在路边的紧急车辆2021-08-17
-
激光雷达制造商图达通获6600万美元B+轮投资,蔚来资本继续参与投资2021-08-17
-
建立运营补贴机制,农村客运将成新能源车辆又一增长点2021-08-17
-
最新进展:蔚来技术人员因私自接触致死车辆数据,被警方传唤2021-08-16
-
品牌创始人车祸身亡!律师:蔚来工作人员私自接触事故车辆被传唤2021-08-16
-
国泰君安领投,激光雷达制造商图达通完成6600万美元B+轮融资2021-08-15
-
图像级激光雷达公司图达通获6600万美元融资,加速量产交付2021-08-15