
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
特斯拉的自动驾驶进阶:一面天使,一面魔鬼
来源:江南网页版登录入口官网下载
网
时间:2018-11-02 10:01:16
热度:
特斯拉的自动驾驶进阶:一面天使,一面魔鬼Autopilot 是把双刃剑……10 月 26 日,特斯拉在北美地区推送了 Navigate on Autopilot。这个在高速场景下解

Autopilot 是把双刃剑……
10 月 26 日,特斯拉在北美地区推送了 Navigate on Autopilot。这个在高速场景下解锁更多技能的 Autopilot,着实让大家眼前一亮。
这篇文章我们就来聊一下新推的 Autopilot 更新。
主要从三个层面入手:
Autopilot 更新了什么?
这些功能背后的逻辑是什么?
如何看待这次更新?
Autopilot 到底更新了什么?
在 10 月 5 日面向欧美推送的 V9.0 软件中,特斯拉简单介绍了一下即将上线的 Navigate on Autopilot 的一些情况:
借助 V9.0,特斯拉将会在未来几个月通过 OTA 升级来扩展现有 Autopilot 功能。
Navigate on Autopilot 是一项主动引导功能,在驾驶员的监督下,可以引导车子自动上下高速匝道,可以实现换道建议、高速出口交汇处和出口导航,同时为用户在高速上规划最适合最高效到达目的地的路径。
输入导航目的地之后,驾驶员可以选择为该行程开启「Navigate on Autopilot」,然后通过方向盘右侧的档杆启动 Autopilot 激活该功能;在进行自动换道操作时,需要驾驶员拨杆操作确认后才能进行变道操作;在不开启「Navigate on Autopilot」的情况下,Autopilot 功能也可以正常使用。
Navigate on Autopilot 功能首先会以 影子模式 运作,特斯拉会根据数百万公里的真实驾驶来验证其性能,验证收尾后,将把 Navigate on Autopilot 作为测试功能向美国用户推送,未来将会向其他地区推送相关更新(各地监管批准后)。

10 月 26 日,Navigate on Autopilot 功能正式上线。在这里有个很有意思的信息点:
Since introducing Software Version 9.0, Tesla owners with Enhanced Autopilot have driven tens of millions of miles to support the validation of Navigate on Autopilot, allowing us to collect performance and safety data at scale, based on real-world driving.
从推出 V9.0 开始,装配有「增强版自动辅助驾驶」的特斯拉车主已经驾驶数千万英里来支持 Navigate on Autopilot 的验证工作,使我们能够根据实际驾驶情况来收集相关数据。
短短二十几天时间特斯拉就完成了数千万英里的路测验证,不得不说,这是特斯拉的优势所在,这也是为什么谷歌要花大价钱买 6.2 万台克莱斯勒 Pacifica+2 万台捷豹 I-PACE 作为无人车的原因。
好了,回到 Navigate on Autopilot。
特斯拉专门在官网发了一篇博文来介绍这个功能,基本与 V9.0 预告版中提到的功能类似,同时更新了两个信息点:
在最开始,使用这项功能自动变道的时候驾驶员必须拨杆进行确认,但是在未来车子可以实现真正的自动变道。
Navigate on Autopilot 提供两种不同的车道变换模式,一种基于行驶路线,另一种则是基于车速,给车子提供更高效的出行效率。
对于责任主体的划分,特斯拉分的很明确:
In both of these scenarios, until truly driverless cars are validated and approved by regulators, drivers are responsible for and must remain in control of their car at all times.
在上述这两种(变道)情况下, 虽然车子可以实现不同程度的自动变道,但是责任主体依然是人。 除非真正的无人驾驶车辆被监管机构认为合法有效。
也就是说,在高速场景下,Autopilot 获得很大的权限,从最初的只是在符合条件路况下的开启,到现在可以自行进行路径规划,可见特斯拉 Autopilot 在特定场景的自动驾驶能力有所提升。
这些功能背后的逻辑是什么?
我们都知道自动驾驶分为:感知(定位)、决策、控制三个板块。
感知
首先了解特斯拉 Autopilot 的硬件:AP1.0 硬件无法实现最新的 Navigate on Autopilot,这里就不说了,AP2.0 和 AP2.5 硬件方面除了处理器之外差别不是很大,都是 8 个摄像头、12 个超声波传感器、1 个 77GHz 毫米波雷达。
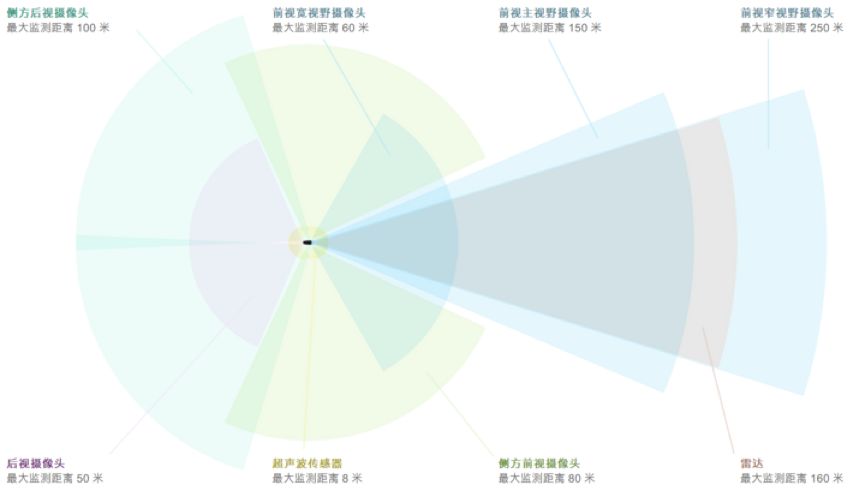
摄像头作为大头,可以通过图像匹配实现一定程度的定位,进行物体检测,识别行人、路牌、交通灯等,实现对周围环境的建模,特斯拉 8 个摄像头全开意味着可以获取更多的数据,同时对于算力也提出了更高的要求(可以看到为什么特斯拉选择自研车载 AI 芯片);
超声波雷达负责探测周边近距离障碍物,主要用于低速场景下的倒车和自动泊车;
毫米波雷达可以实现对多种复杂目标的准确识别,探测距离可以达到 160 米,可以提供更精准的测距测速;
定位
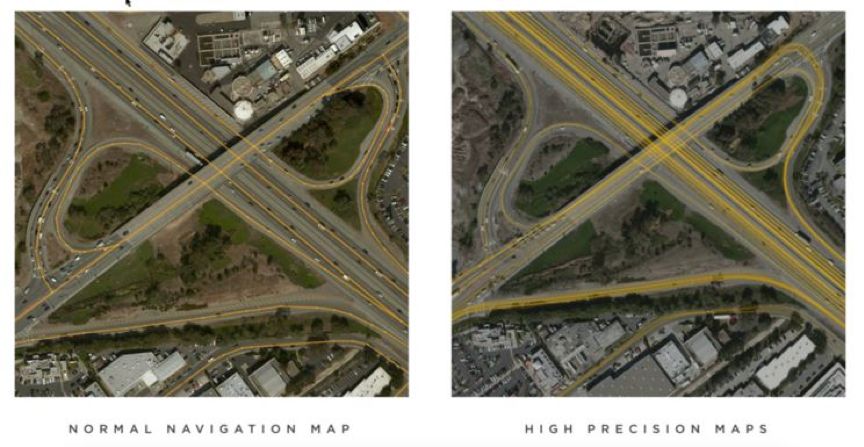
智能驾驶和我们人工驾驶不同,需要更加精准的导航地图。
特斯拉利用高精度 GPS+IMU(惯导)来进行定位,采用 MapBox(一种用于定制设计地图的开源映射平台)和 Valhalla(一种开源导航引擎)+在跑的这几十万辆车子的各类传感器获得的路况信息来搭建自己的地图和导航系统。
这还不是最关键的,马斯克说特斯拉的车辆与车辆之间已经形成了一个庞大的「车队学习网络」,所有车都为数据共享做贡献。
「When one car learns something, they all learn it. 」
「当一辆车获悉某些信息时,其他车辆也可以很快得到更新」。
这种学习能力让特斯拉 Autopilot 得以更快的进化。
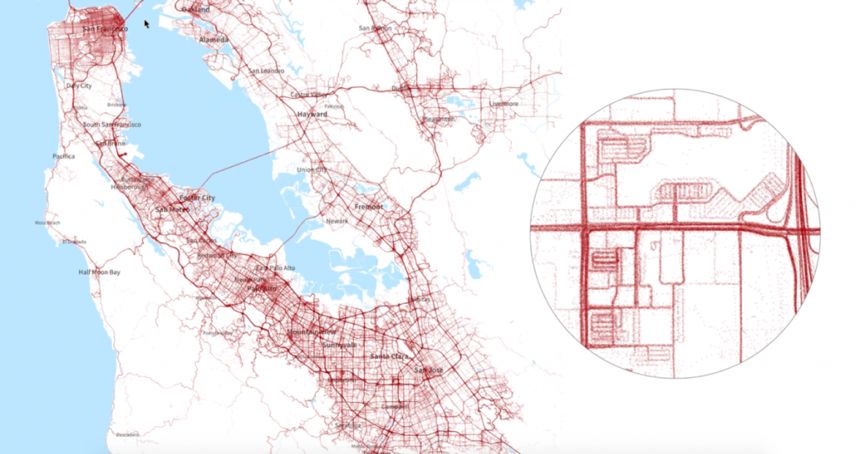
美国是特斯拉的大本营,所获取的地图信息自然更完备,这也是 Navigate on Autopilot 首先在美国进行测试的原因。
决策+控制
到这里应该很明了了,8 路摄像头全开+大数据喂养+算法优化+自家导航的完善使 Autopilot 更加智能。
从之前的单车道 ACC+LKA 到之后的半自动变道(驾驶员打转向车子自动变道),再到现在的自动上下匝道,同时可以根据车速和行驶路径的变道,特斯拉给 Autopilot 赋予了更大的权限。

如何看待这次更新?
在特斯拉推送 Navigate on Autopilot 之后,有特斯拉车主也在 Youtube 上传了自己的体验视频。
从视频中不难发现,Autopilot 在平顺性以及视觉识别方面有很大提升。但是,有一个问题依然值得思考:在 Autopilot 下放的权限越高的情况下,在驾驶过程中 Autopilot 担责的风险也就越高。尤其是在高速场景下,车子以极快的速度运作,驾驶员是否能够做出足够及时的反应?
首页 下一页 上一页 尾页

-
无人驾驶新能源车下月可试驾2023-11-30
-
【e周热点】百度自动驾驶公开运营;长城宝马合资工厂布局完成......2018-11-02
-
相比燃油类汽车,江南网页版登录入口官网下载 在哪些方面为驾驶者提高了舒适性?2018-11-01
-
福特与百度再次联手 启动自动驾驶测试项目2018-11-01
-
你的第一台国产特斯拉 可能是27万元起售的Model Y2018-11-01
-
自动驾驶副总裁移情别恋,拜腾汽车恐迎来量产危机2018-11-01
-
谷歌旗下Waymo无人驾驶将收费 公司估值或达700亿2018-10-30
-
电动化、自动驾驶、共享出行是未来汽车行业利润来源2018-10-30
-
IEEVChina 2018报道 | 8辆自动驾驶测试车“持证”亮相2018-10-29
-
大众2020年将推出电动汽车 价格仅为特斯拉一半2018-10-29
-
特斯拉涉嫌虚报Model 3产量遭FBI调查 公司称并未收到传票2018-10-29
-
Model3拯救特斯拉!ES6拯救蔚来汽车?2018-10-29
-
特斯拉上海工厂环评公示:年产能25万辆2018-10-28
-
马斯克的脸又肿了,特斯拉无人驾驶还待猴年马月2018-10-27
-
【e周热点】吉利飞行汽车接受预定;特斯拉前任高管加盟苹果汽车......2018-10-26