
五部门关于开展2024年江南网页版登录入口官网下载 下乡活动的通知
首页 > 江南app官方版下载
基于DSP的电动机电磁兼容设计
来源:江南网页版登录入口官网下载
网
时间:2017-02-09 16:31:18
热度:
基于DSP的电动机电磁兼容设计在详细介绍了电磁干扰理论知识的基础上,对无刷直流电动机控制系统的电磁兼容性软硬件设计进行了分析,电磁兼容性设计有利于提高无刷直流电动机控制系统的抗干扰
在详细介绍了电磁干扰理论知识的基础上,对无刷直流电动机控制系统的电磁兼容性软硬件设计进行了分析,电磁兼容性设计有利于提高无刷直流电动机控制系统的抗干扰能力,增强系统的可靠性和稳定性。
1 电磁干扰
熟悉和了解常见的电磁干扰源是发现和解决电磁干扰问题的关键之一。电磁干扰可分为自然和人为两类。所谓自然的是指自然界所固有的与人类的活动无关的电磁干扰现象。所谓人为的是指由于人类的工业和社会活动所产生的电磁干扰[1,2]。
1.1 电磁干扰源
诸如雷电的放电现象,电动机的TTL逻辑元件、动态RAM、电源、震荡器件及变压器等在工作时都会产生高频电磁波或者噪音,严重影响电动机的正常工作。
1.2 电磁干扰能量的耦合途径
耦合是指电路、设备、系统与其它电路、设备、系统间能量的联系。各种电磁骚扰源通过耦合传输电磁能量到敏感设备。耦合途径有两种方式:传导耦合与辐射耦合。
1.2.1 传导耦合
传导耦合是通过电源线、信号线、互联线、接地导体等连接通道进行耦合。按耦合方式又可划分为公共阻抗耦合、电容性耦合、电感性耦合三种基本方式。实际中,这三种方式是同时存在共同作用的。
1)公共阻抗耦合
当电路电流经过一个公共阻抗时,一个电路的电流在该公共阻抗上形成的电压就会影响到另一个电路。公共电源阻抗耦合模型及其等效电路如下:
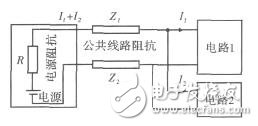
图1 公共电源阻抗耦合模型

图2 公共电源阻抗等效电路
图2中将图1中的电源阻抗及公共线路阻抗合并表示为R,U为理想电压源,Z1、Z2分别为电路1和电路2的阻抗。根据等效电路有:

由上式可以看出由于R的存在,电路1电源电流的任何变化都会影响电路2的电源电压。若R=0,则U1=U2=U,即电路1和电路2无公共阻抗耦合。降低电路1与电路2间的公共阻抗耦合即减小电源阻抗和公共线路阻抗。一方面可将电路的电源引线靠近电源输出端,从减小电源线长度的方式来减小公共线路阻抗;另一方面可采用稳压电源将电源内阻降低[3]。
2)电容性耦合
电容性耦合是由两条电路间的电场相互作用所引起的,其耦合模型及等效电路如下:

图3 电容性耦合模型
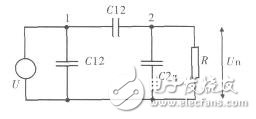
图4 电容性耦合等效电路
C12是导体1与导体2之间的分布电容,C1g是导体1与地之间的电容,C2g是导体2与地之间的电容,R是导体2与地之间的电阻,U1是作为骚扰源的导体1的电压,电路2为受干扰电路,Un是线路2与地之间产生的骚扰电压。
根据等效电路则有:
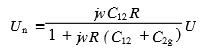
若R为低阻抗,且满足 则
则
![]() (1)
(1)
若R为高阻抗,且满足![]() 则
则
![]() (2)
(2)
式(1) 表明电容性耦合的骚扰作用相当于在导体2与地间接了一个幅值In=jwC12U的电流源。在骚扰源电压和频率恒定的情况下要减小耦合干扰,一方面可使敏感电路在较低的电阻值上工作,即通过减小R的方式来减小Un;另一方面导体通过合适地取向、屏蔽或隔离的方式减小C12来达到减小Un。
式(2) 表明在高阻抗的情况下电容性耦合骚扰作用只与C12、C2g有关,且此时产生的骚扰作用要大的多。
3)电感性耦合
电感性耦合是由两电路间的磁场相互作用引起的,其耦合模型及等效电路如下:
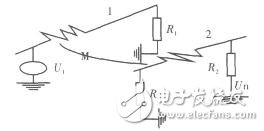
图5 电感性耦合模型

图6 电感性耦合等效电路
电路1中干扰电源I1在电路2的负载电阻R和R2上产生的骚扰电压分别为:
其中S为回路面积,B是角频率为的正弦变化磁通密度的有效值。由上式可知,可通过减小B、S、cosθ的方式减小电感性耦合骚扰的目的。
1.2.2 辐射耦合
辐射耦合是以电磁场的形式将电磁能从骚扰源经空间传输到敏感设备。空间中除了骚扰源有意辐射之外,还存在许多无意辐射的电磁波,而处在这一电磁场中的导体都能感应出电压。因此,辐射干扰可通过天线、导线、闭合回路等方式对
电动机控制系统进行干扰。
2 系统硬件的电磁兼容的设计
DSP电路的工作频率很高,芯片管脚很密,在与模拟器件一起进行数模混合设计时,对PCB版的设计要求很高[4]。以下为设计时必须遵守的准则和要求。
随着电子器件的小型化及封装密集化,有必要采用多层印刷电路板,其中包括单独的数字地层、电源层及其其它信号层。在布线时,单独设置的电源层有利于电路板元器件的布放;采用地层则不仅省去了大量器件管脚接地的工作量,而且可以有效地改善数字地线的质量。但应注意,在布孔、布线时应考虑通孔焊盘和过孔会将地层打断,过多的通孔会影响地层的抗干扰效果。本系统采用了四层板结构,分别为地层、电源层和两面元件层。在绘制PCB也特别考虑了通孔焊盘和过孔的使用, 将尽可能多的网络在元件层布通。
由于基于DSP的电动机控制系统使用的微处理器内核采用独立电源供电模式,因此对于具有144个管脚的TSM320LF2407A,需要较多的电源解
耦电容,为了节省空间,减小通孔数目,系统采用贴片电容,达到了较好的解耦效果。
接地应遵循的基本原则是:数字地、模拟地、屏蔽地应该合理接地,不能混用。尽可能的使接地电路各自形成回路,减少电路与地线之间的电流耦合。合理布置地线使电流局限在尽可能小的范围内,并根据地电流的大小和频率设计相应宽度的印刷电路和接地方式。DSP的A/D采样模拟电源引脚VCCA和VSSA必须区别于任何数字电压电源引脚,避免数字干扰信号通过地线耦合。同时,A/D转化器的模拟地线采用单点接触,数字地与模拟地在电源处连接并在此处接大地。 VCCA和VSSA模拟引线在印刷电路板布线时应尽可能的短,以使二者正确匹配。
3 软件电磁兼容设计
TSM320LF2407A有丰富的指令集、极高的运行速度及软件看门狗(watchdog)和实时中断(RTI)模块,这些特点都为软件抗干扰提供了良好的条件。本系统主要采用以下几种软件抗干扰设计。
3.1软件陷阱法
由于干扰,往往会导致运行程序进入程序存储器的空白区(即无指令区),这种现象叫做程序“跑飞”。因此在各个子程序之间、各功能模块之间和所有空白处,都写上连续3个空操作(nop),后接一无条件转移指令,一旦程序跑飞到这些区域,就会自动返回执行正常程序。即:
Nop
Nop
Nop
LJMPADDRESS:ADDRESS指定地址;
3.2 程序的冗余设计
在程序存储器的空白区域,写入一些重要的数据表和程序作为备份,以便系统被破坏时仍有备份参数和程序维持系统正常工作。由于LF2407A的数据存储以数据页为基准,如果对不同数据页的数据进行操作而不指定相应的数据页,会导致程序跑飞。因此需要对程序未使用满的数据页进行填充,防止数据页混乱导致程序的系统误操作。
3.3 软件看门狗设计
看门狗定时器(WDT)又称监视定时器,可使微机系统从故障中恢复过来。在微机系统启动时,也启动WDT。它将对机器的状态周期进行计数,每一个状态周期计数器加1,当计数器溢出时,能自动的将复位引脚的电平拉低至少两个状态周期的时间,这个复位信号使得DSP复位。在正常工作时,定期的用软件去复位 WDT,而不会使WDT溢出造成系统复位。可是,如果程序一旦“跑飞”进入死循环或误区,这时软件就不会复位WDT,从而使WDT的计数达到溢出而使系统复位。系统复位后又从000H单元开始执行程序,这样就可把“跑飞”的程序拉回到正常的程序中。
4 结论
电磁兼容设计关系到基于DSP的电动机控制系统能否安全工作。电动机控制系统设计应根据系统的工作环境,控制系统的技术指标,工艺复杂性,成本等因素进行电磁兼容的综合设计。电动机控制系统的设计采用上述电磁兼容性设计,可使运行稳定可靠,故障率低,达到预期效果!


-
常州纯电动汽车:重大利好 高速电动出行2023-11-30
-
插电混动和纯电动汽车孰好孰坏2023-11-30
-
湖州市安吉县首批850辆分时租赁纯电动汽车投入运营2017-02-05
-
一张图让你重新彻底认识纯电动汽车!2017-02-05
-
10款即将上市的纯电动汽车详解2017-02-03
-
从用车角度浅谈如何正确选购纯电动汽车2017-02-03
-
对照新能源车准入规定深度理解设计开发2017-01-21
-
斥资3.5亿美元!特斯拉超级电池工厂建立电动机生产线2017-01-19
-
疑似吉利纯电动汽车在天津快速路起火2017-01-16
-
电动汽车的系统级EMC设计2017-01-05
-
谈谈纯电动汽车技术门槛 要求咋辣么多2017-01-03
-
中国最值得出口的五款纯电动汽车:比亚迪/宝马/北汽2017-01-03
-
解析平衡防爆在IP67设计和IP67的有效性2017-01-03
-
如何用万用表判断电动机好坏2016-12-30
-
纯电动汽车:2016是转型年 2017将是提升年2016-12-27